

An unmanned vehicle transverse motion control method based on GK clustering algorithm model prediction
A technology of model prediction and clustering algorithm, applied in computing, computer parts, character and pattern recognition, etc., can solve problems such as vehicle instability, vehicle rollover, and reduced control accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
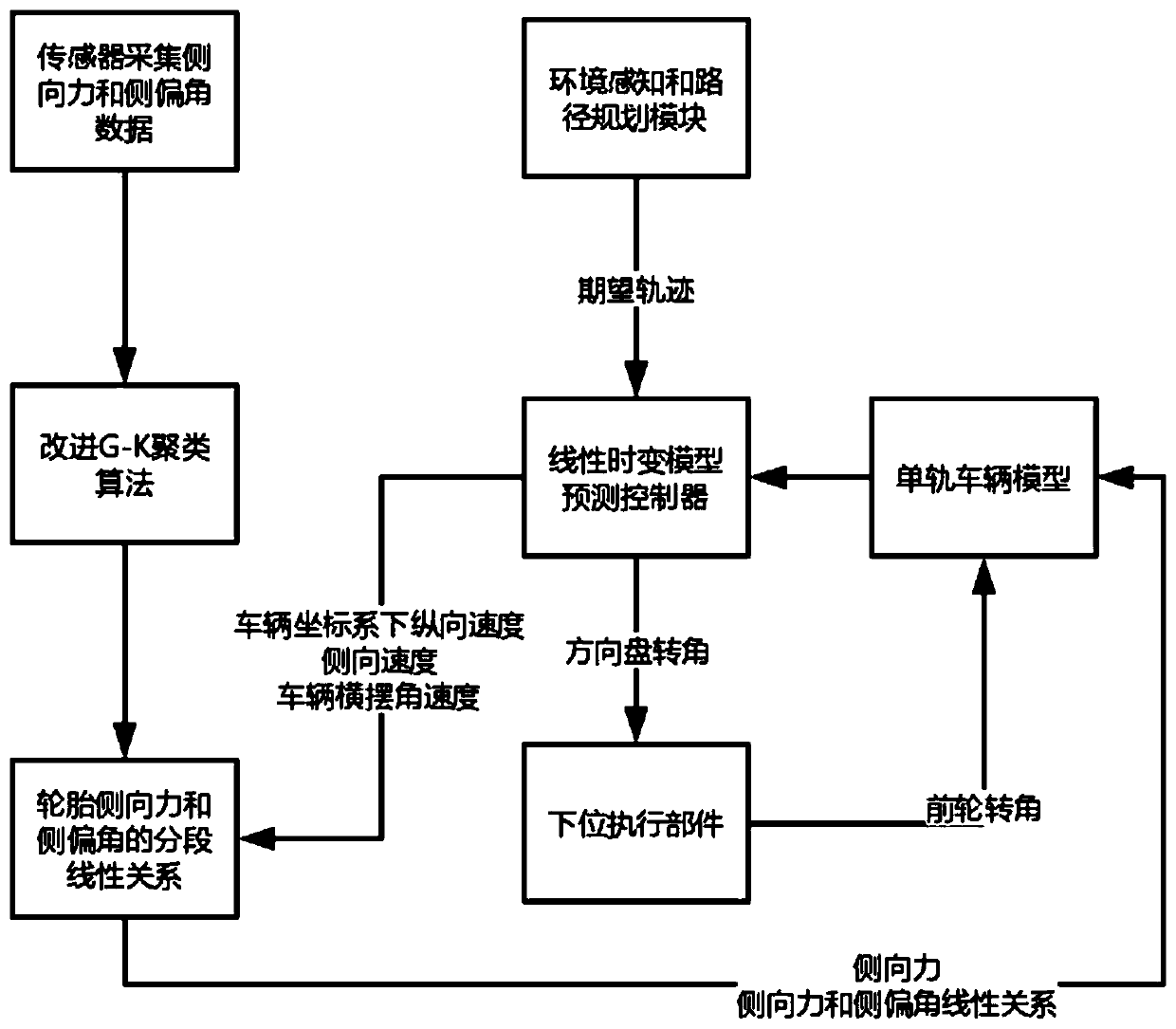
[0098] Based on an improved G-K clustering algorithm, the invention linearizes the part of the nonlinear relationship between tire lateral force and side slip angle, and then performs lateral control of the vehicle through a linear time-varying model predictive control algorithm. Control flow such as image 3 As shown, the specific technical scheme adopted is as follows:
[0099] A control method for the lateral motion of unmanned vehicles based on GK clustering algorithm model prediction, which provides real-time steering wheel angle for the control object vehicle, so as to realize the control of the lateral motion of the control target, including the following steps:
[0100] Step 1, use the vehicle sensor to obtain the current state of the vehicle in real time, such as center of mass velocity, heading angle, yaw rate, current coordinates of the vehicle, tire slip angle and vehicle speed information.
[0101] Step 2: Use industrial cameras and millimeter-wave radar to colle...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More