

Magnetic control soft grasping robot based on magnetically programmed temperature sensitive hydrogel
A temperature-sensitive hydrogel and robot technology, applied in manipulators, chucks, manufacturing tools, etc., can solve problems such as poor results, and achieve excellent performance, stable gripping, and increased gripping friction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, but the protection scope of the present invention is not limited thereto.
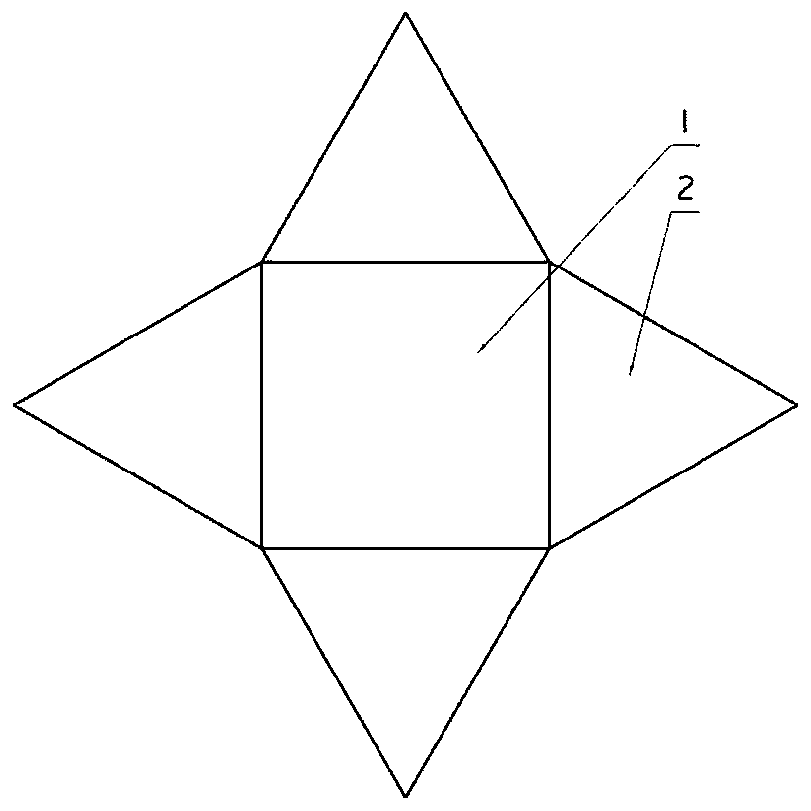
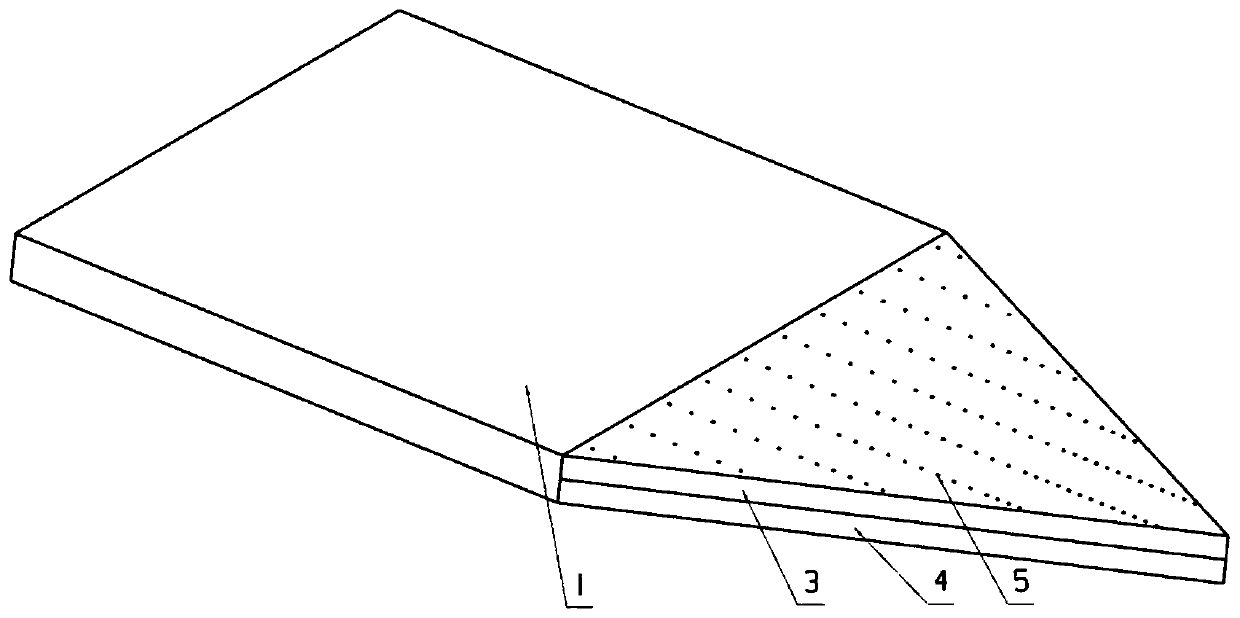
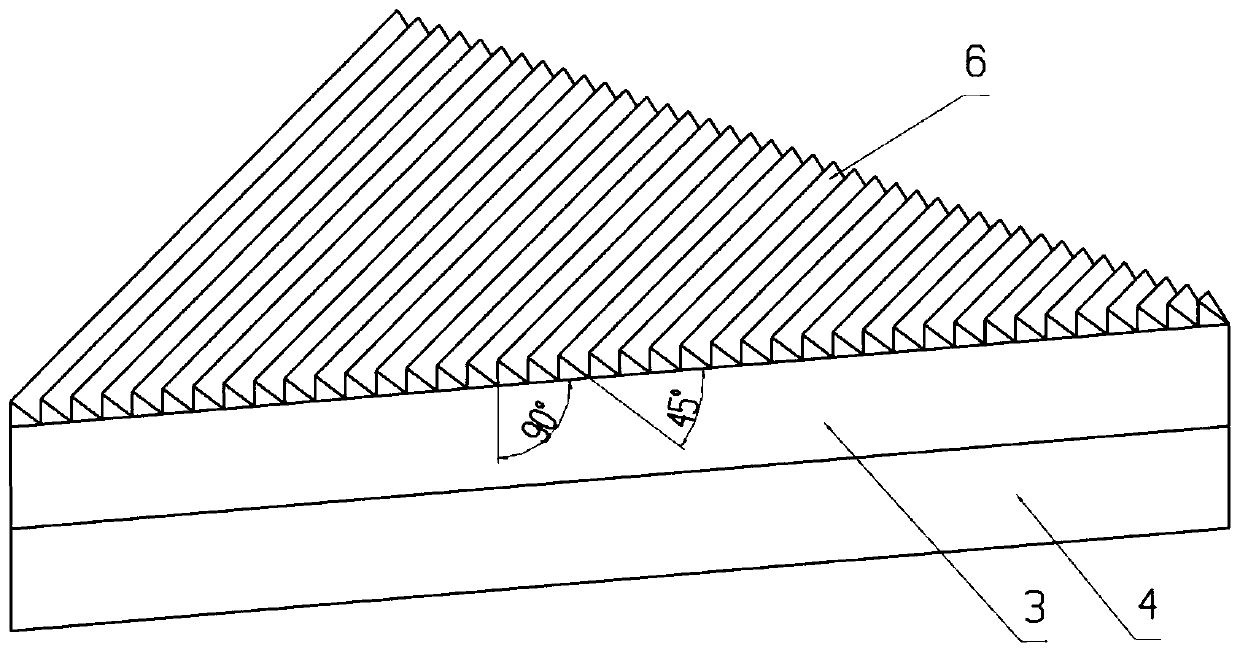
[0036] Such as figure 1 and figure 2 As shown, the magnetically controlled soft-body grabbing robot based on magnetically programmed temperature-sensitive hydrogel according to the present invention includes a central part 1 and a gripper part 2, and several gripper parts are evenly distributed around the central part 1, and the gripper part The hand part 2 is a temperature-responsive hydrogel containing magnetic particles, and the grip part 2 is bent by applying an alternating magnetic field to the grip part 2 . Any of the gripper parts 2 has a double-layer structure, the upper layer structure 4 is a double-network cross-linked hydrogel, and the lower layer structure 3 is a temperature-responsive hydrogel containing magnetic particles. The magnetic field makes the def...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More