

Suspended crawler-type cable climbing robot
A crawler-type, robot technology, applied in the field of inspection robots, can solve the problems of unsmooth inspection work, poor ability to cross obstacles, easy to break down at high altitudes, etc., and achieve the effect of convenient climbing rope inspection operation, large effective load, and lightening of the machine's own weight.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
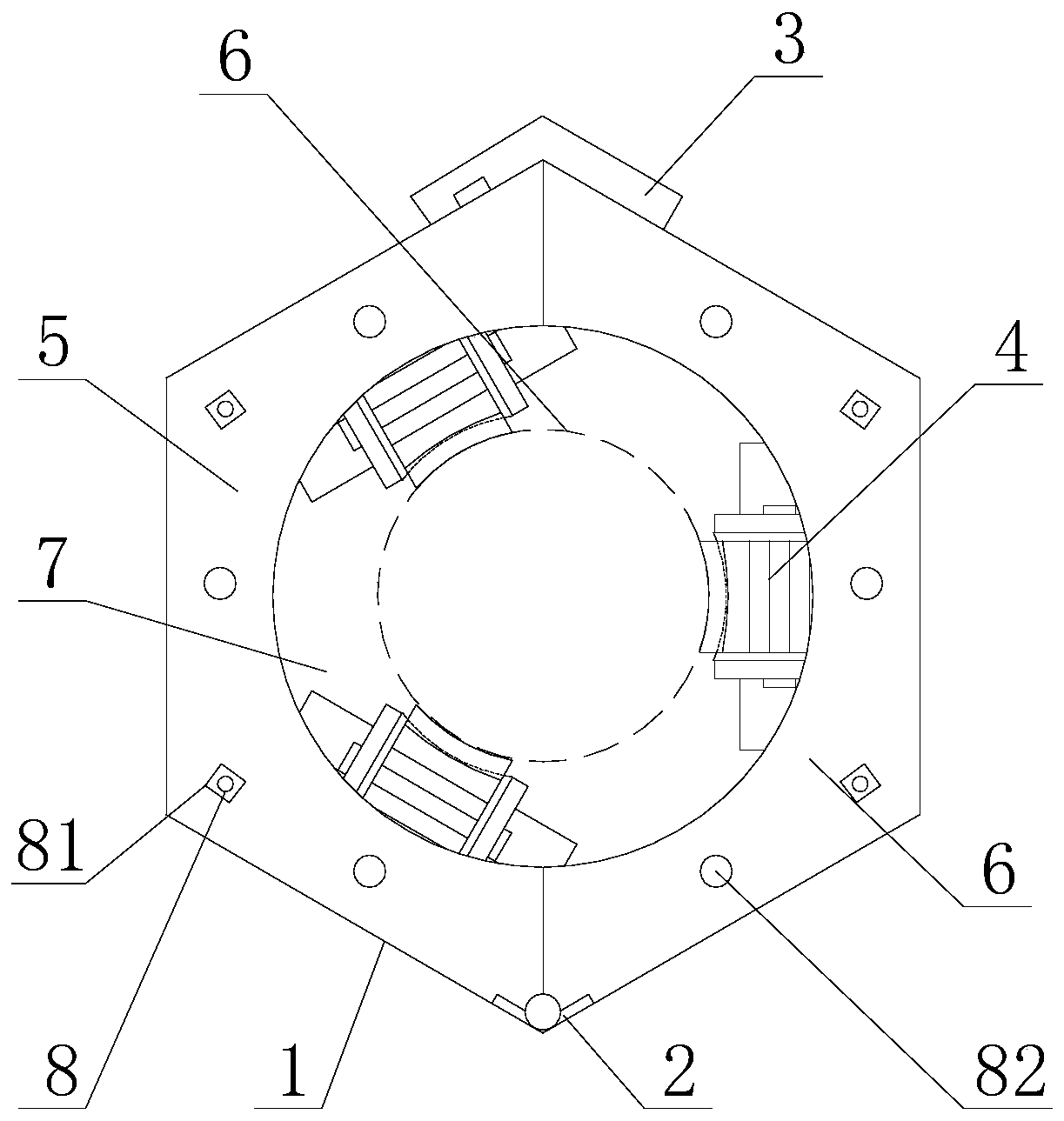
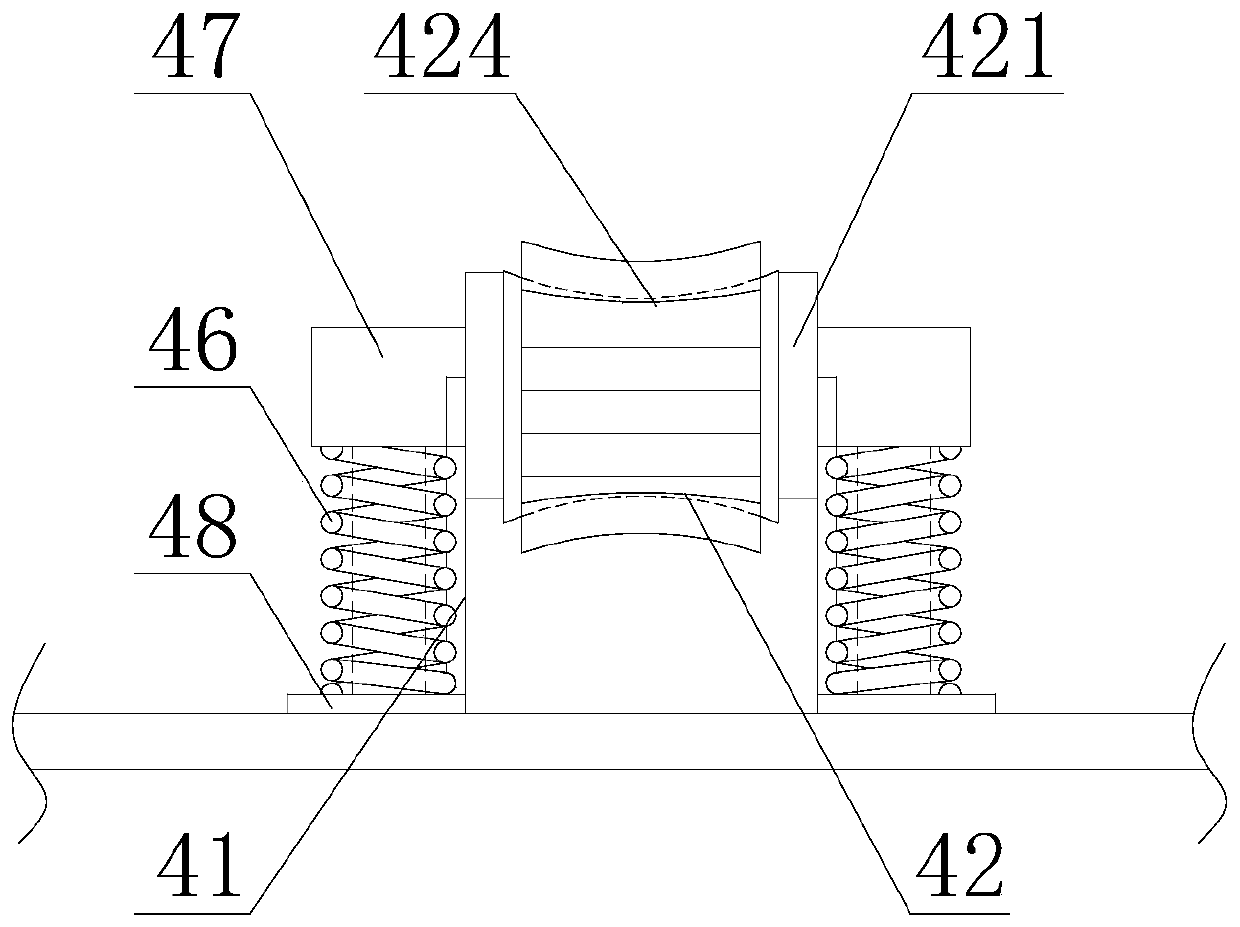
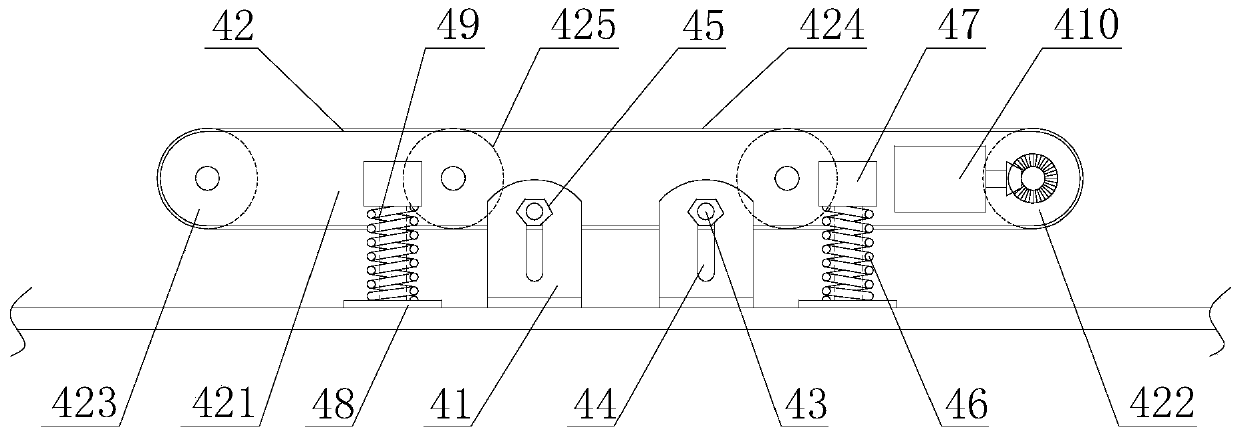
[0055] Such as Figure 1 to Figure 4 As shown, a kind of suspension crawler type climbing rope robot in the present embodiment, it comprises hexagonal frame 1, and the size of six sides of described hexagonal frame 1 is consistent, and described cube frame 1 is made up of left and right halves The racks are butted, and each half of the rack is fixedly connected by three panels. One end of the left and right halves of the rack is hinged by a hinge 2, and the other end is connected by a hasp lock 3. The hasp lock 3 opens the left and right halves. The frame can be opened, and the hasp lock 3 fastens the left and right halves of the frame to fix it to form a rigid hexagonal frame 1. The inside of the hexagonal frame 1 is provided with three sets of suspension crawler-type holding mechanisms 4, one of which is suspended The crawler-type gripping mechanism 4 is arranged on the middle panel of one half of the frame, and the other two sets of suspended crawler-type gripping mechanism...
Embodiment 2
[0068] see Figure 5 , the difference between embodiment 2 and embodiment 1 is: the left and right halves of the frame are fixed by a plurality of hoops 9, the hoops 9 are hexagonal, and the hoops 9 include the left and right halves of the hoop body, the left and right halves One end of the half hoop body is connected by a hinge 2, and the other ends of the left and right halves of the hoop body are connected by a hasp lock 3.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More