Unmanned aerial vehicle cluster formation control method based on non-inferior solution pigeon colony optimization
A technology of pigeon group optimization and control method, which is applied in the research field of UAV swarm formation control, and can solve problems such as difficulties in online optimization of RHC controllers
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
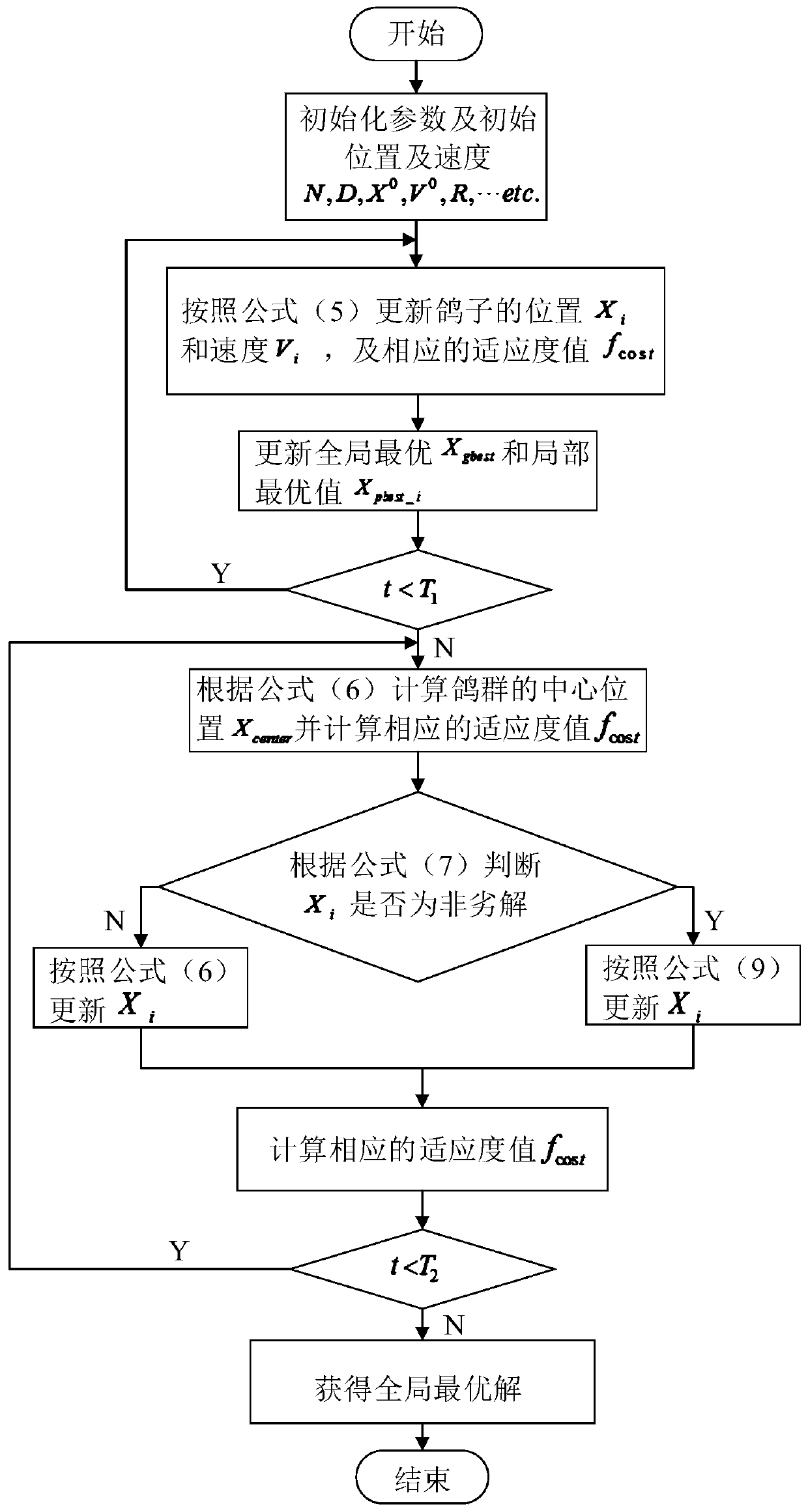
[0078] See Figure 1 to Figure 4 The effectiveness of the method proposed by the present invention is verified below through a specific example of UAV swarm formation. The experimental computer configuration is Intel Core i7-4790 processor, 3.60Ghz main frequency, 4G memory, and the software is MATLAB 2014a version. The specific steps of a UAV swarm formation control method based on non-inferior solution pigeon group optimization are as follows:
[0079] Step 1: UAV swarm formation model
[0080] The UAV swarm is modeled based on the lead-wingman approach. Among them, the leader machine model is as formula (1). The horseshoe vortex model is used to consider the aerodynamic influence of the lead plane's wake on the wingman, and the wingman model is shown in formula (2). Assuming that the mass of each UAV is 1Kg, the speed of UAVs during the formation process is not greater than 80m / s, the range of throttle thrust is [10N, 100N], and the range of heading angle is [-50. ,50°...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com