

Bionic flexible actuator having real-time feedback function and preparation method thereof
A real-time feedback and actuator technology, applied in chemical instruments and methods, piezoelectric effect/electrostrictive or magnetostrictive motors, household appliances, etc., can solve the problem that actuators cannot feedback and cannot achieve intelligent controllability Deformation and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] In order to make the object, technical solution and advantages of the present invention more clear and definite, the present invention will be further described in detail below with reference to the accompanying drawings and examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
[0035] Please also see Figure 1-Figure 7 , the present invention provides some embodiments of a method for preparing a bionic flexible actuator with real-time feedback function.
[0036] Such as Figure 1-Figure 3 Shown, a kind of preparation method of the bionic flexible actuator with real-time feedback function of the present invention comprises the following steps:
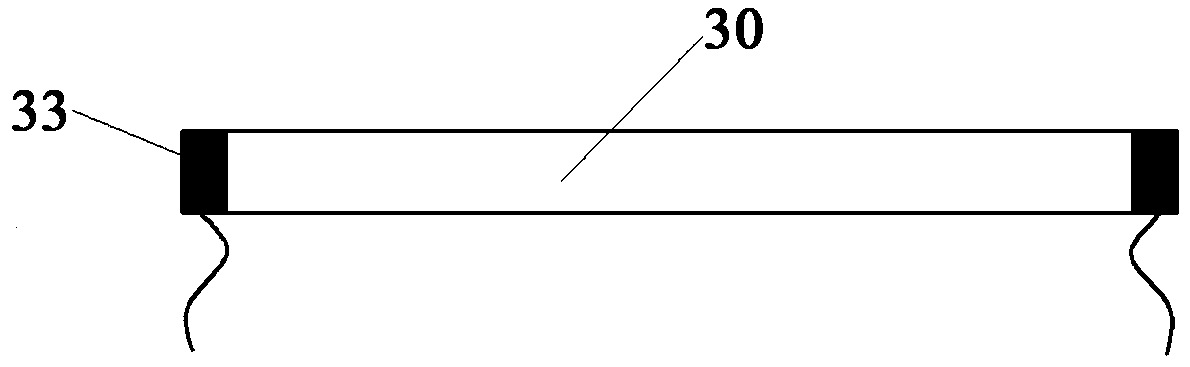
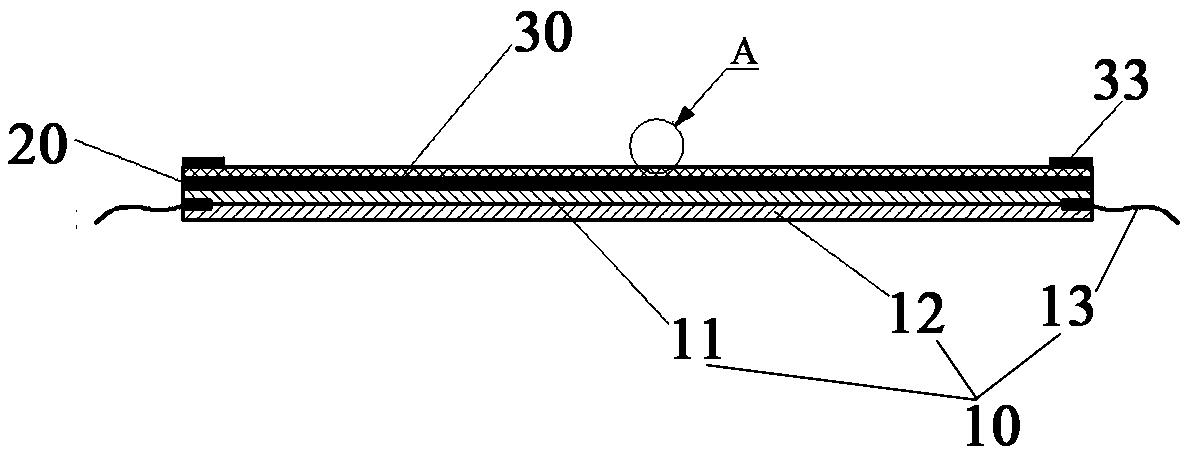
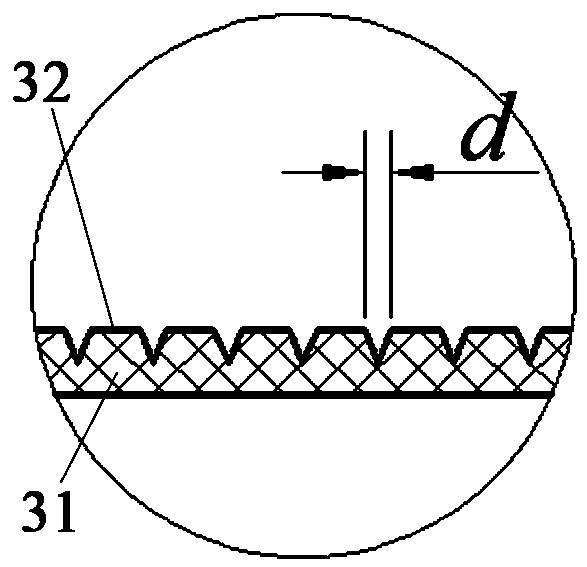
[0037] Step S100 , preparing the stimulus response layer 10 and the bionic flexible strain sensing film layer 30 , the bionic flexible strain sensing film layer 30 is provided with a bionic V-groove array structure.
...
PUM
| Property | Measurement | Unit |
|---|---|---|
| thickness | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More