

Combined joint and cartesian space six-axis industrial robot path planning method
An industrial robot, Cartesian space technology, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve the problem that the motion plan cannot be biased, and achieve the effect of high applicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The specific embodiments of the present invention will be described in detail below in conjunction with the technical solutions and accompanying drawings.
[0023] The system used in the present invention comprises UR3 six-axis industrial robot (Universal Robots), industrial robot controller, gripper, Kinect camera, PC. This system, equipped with a Kinect camera, is to identify the target object and give the pose of the target object. At the same time, it can also identify whether there are obstacles in the environment, so that the six-axis industrial robot can avoid obstacles and perform path planning.
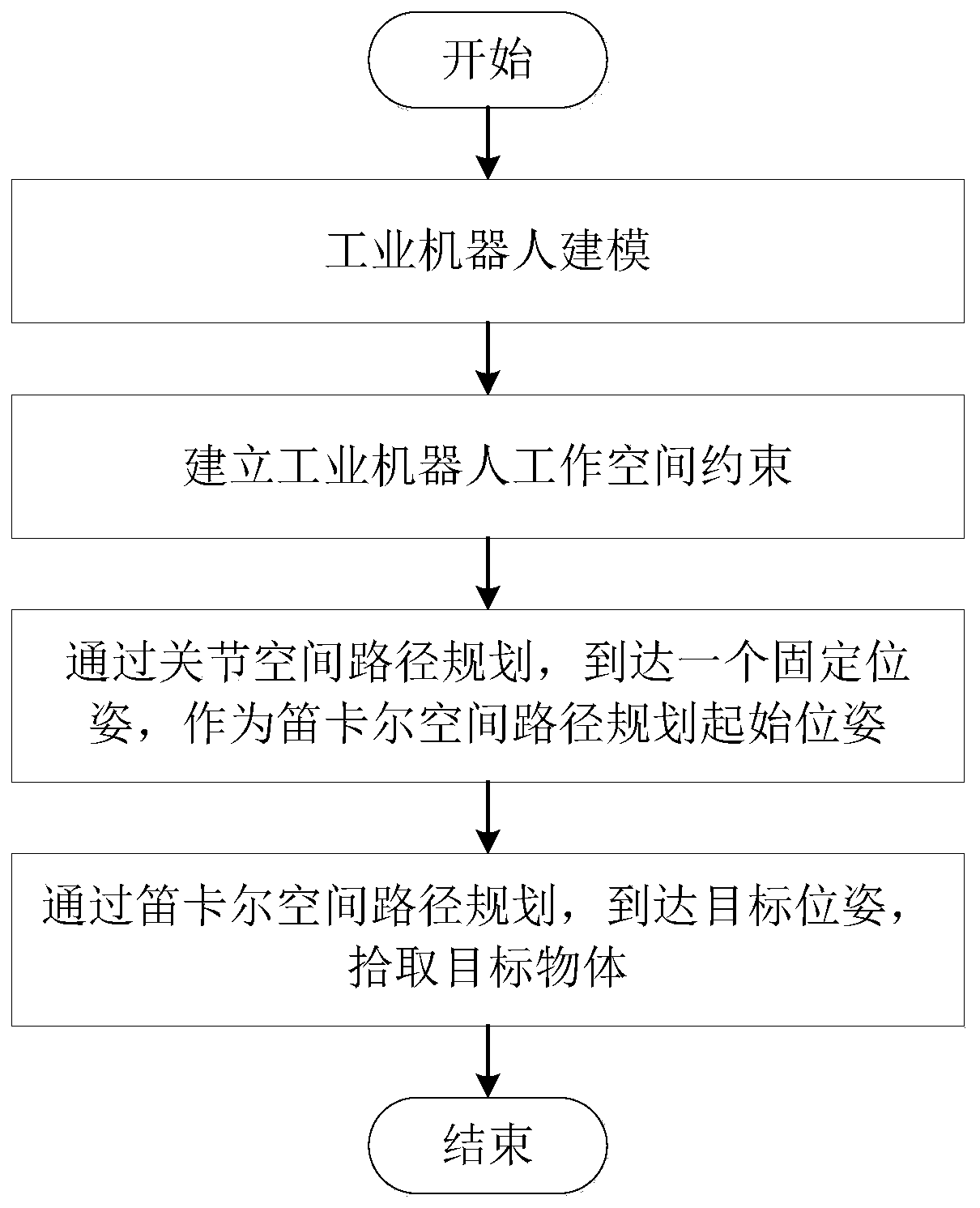
[0024] Such as figure 1 As shown, a path planning method for a six-axis industrial robot combining joints and Cartesian space, the steps are as follows:
[0025] (1) Modeling of six-axis industrial robots
[0026] Taking UR3 six-axis industrial robot as the research object, it is a series industrial robot with 6 degrees of freedom. The robot is described by writing U...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More