

Visual perception optimization method for autonomous driving based on feature time series correlation
A technology of visual perception and automatic driving, which is applied in the field of visual perception of automobile automatic driving, can solve problems affecting application algorithms, inconsistent detection results, and unstable timing of position regression results, so as to improve performance, improve accuracy and stability, and improve The effect of stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
[0037] Embodiment: The automatic driving visual perception optimization method based on feature timing correlation in this embodiment includes a method for improving a deep convolutional neural network detection architecture, a method for improving a target detection training database, a method for improving an offline training process, and an improved method for an online reasoning process.
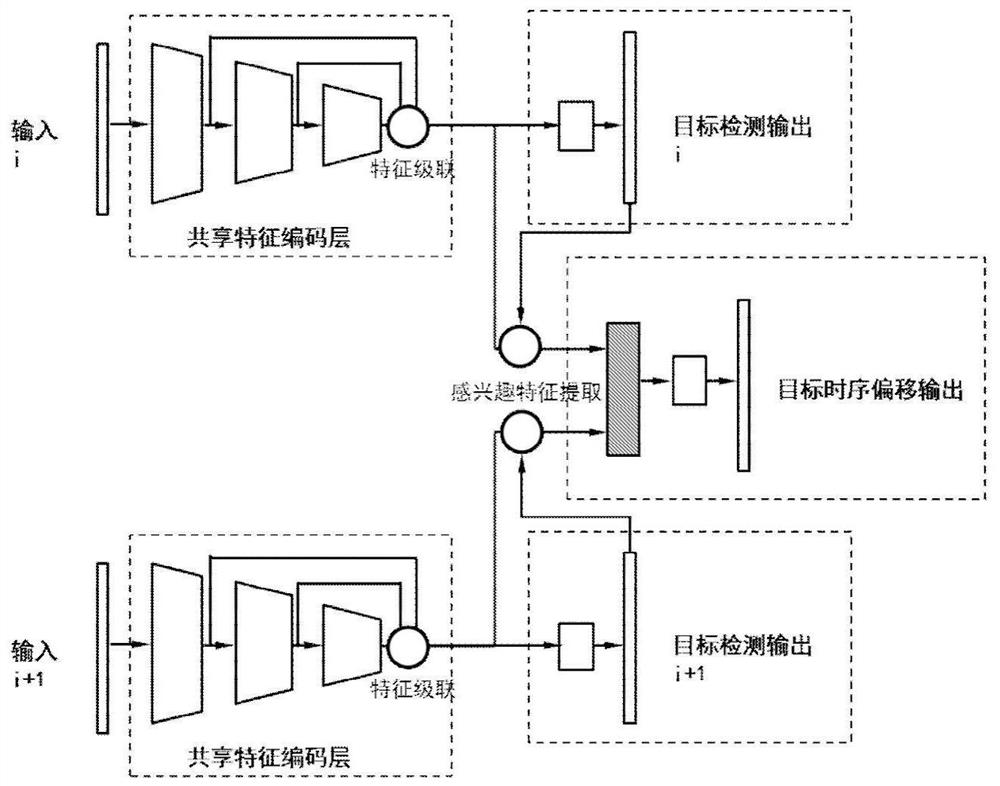
[0038]1. The improvement method of the deep convolutional neural network detection architecture is as follows: under the backbone framework of the existing deep neural network detection architecture, add a feature timing correlation branch, such as figure 1 As shown, in order to retain the flexibility of forward reasoning applications, the input of the deep detection network is a 3-channel RGB image, and the output is a target list (including various vehicles, pedestrians, bicycles, traffic signs, signal lights, etc. by default), based on cascade Convolution features, namely figure 1 The...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More