An intelligent grasping system and method based on the brain-cerebellum model
A brain and cerebellum technology, applied in the field of intelligent grasping systems based on the brain-cerebellum model, can solve the problems of unable to identify obstacles, unable to identify the three-dimensional posture and coordinate position of the object to be grasped, and achieve the effect of simple functional operation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
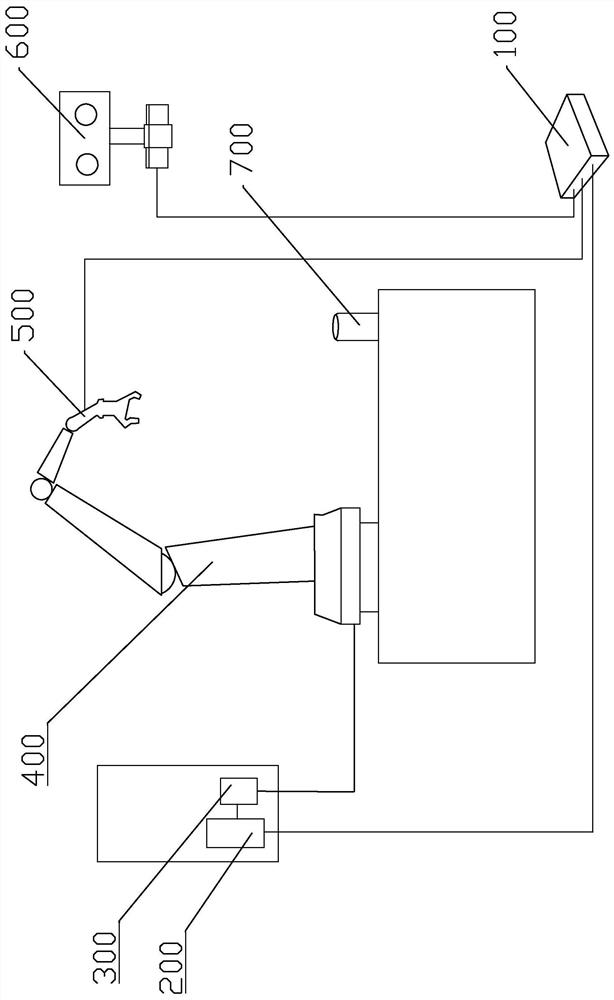
[0035] The cerebellum module 200 is used to control the movement member 400 to act through the drive module 300, and the dual
[0036] The moving member 400 is provided with a grasping member 500, and the grasping member 500 and the end of the moving member 400 pass through the method
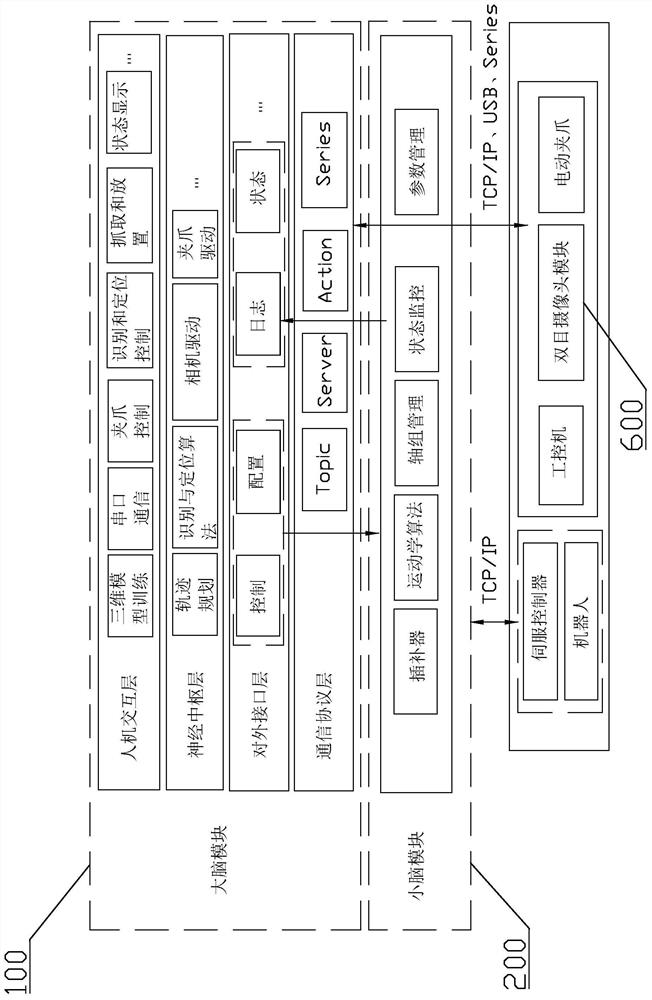
[0037] As optimization, the brain module 100 is a ROS system.
[0038] The brain module 100 is integrated in the industrial computer.
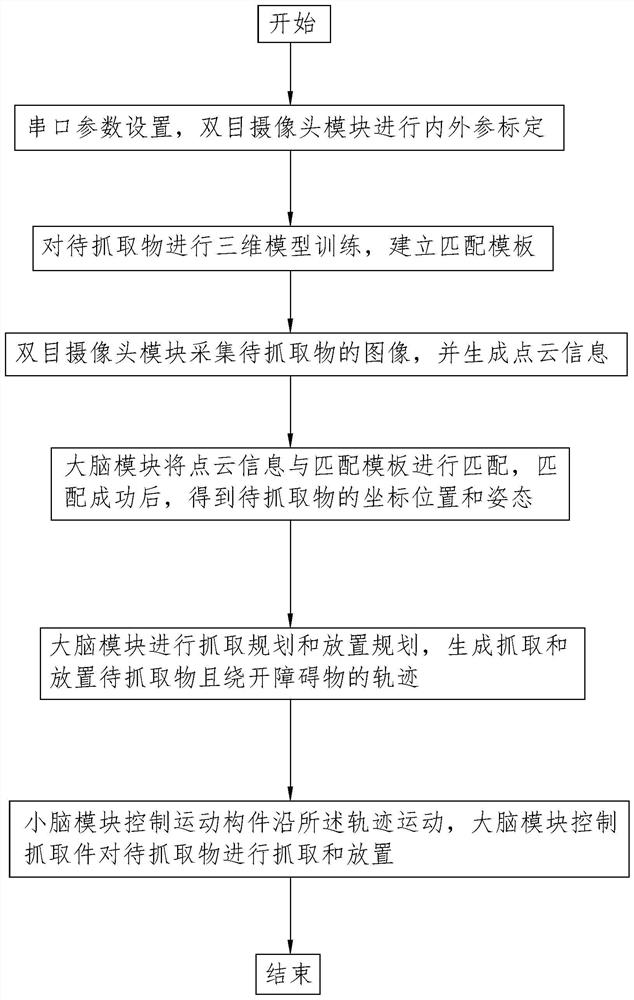
[0044] The pose is the coordinate position and the pose.
[0046] The identification and positioning algorithm module is used to receive and analyze the image information collected by the binocular camera module 600.
[0051] As an optimization, the cerebellum module 200 is a robot control system.
[0052] The industrial computer and the robot control system are connected by a network cable. The robot control system described in this embodiment is
[0056] The state monitoring module is used to monitor the motion state of the robot.
[0057] The parameter managemen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com