

Improved particle swarm algorithm optimized fuzzy PID unmanned helicopter attitude control method
A technology for improving particle swarms and unmanned helicopters. It is applied in attitude control, adaptive control, electric controller, etc. It can solve problems such as difficulty in achieving optimality, unsatisfactory adaptive ability and control effect, and cumbersome parameter tuning methods. , to achieve the effect of improving control performance and enriching diversity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
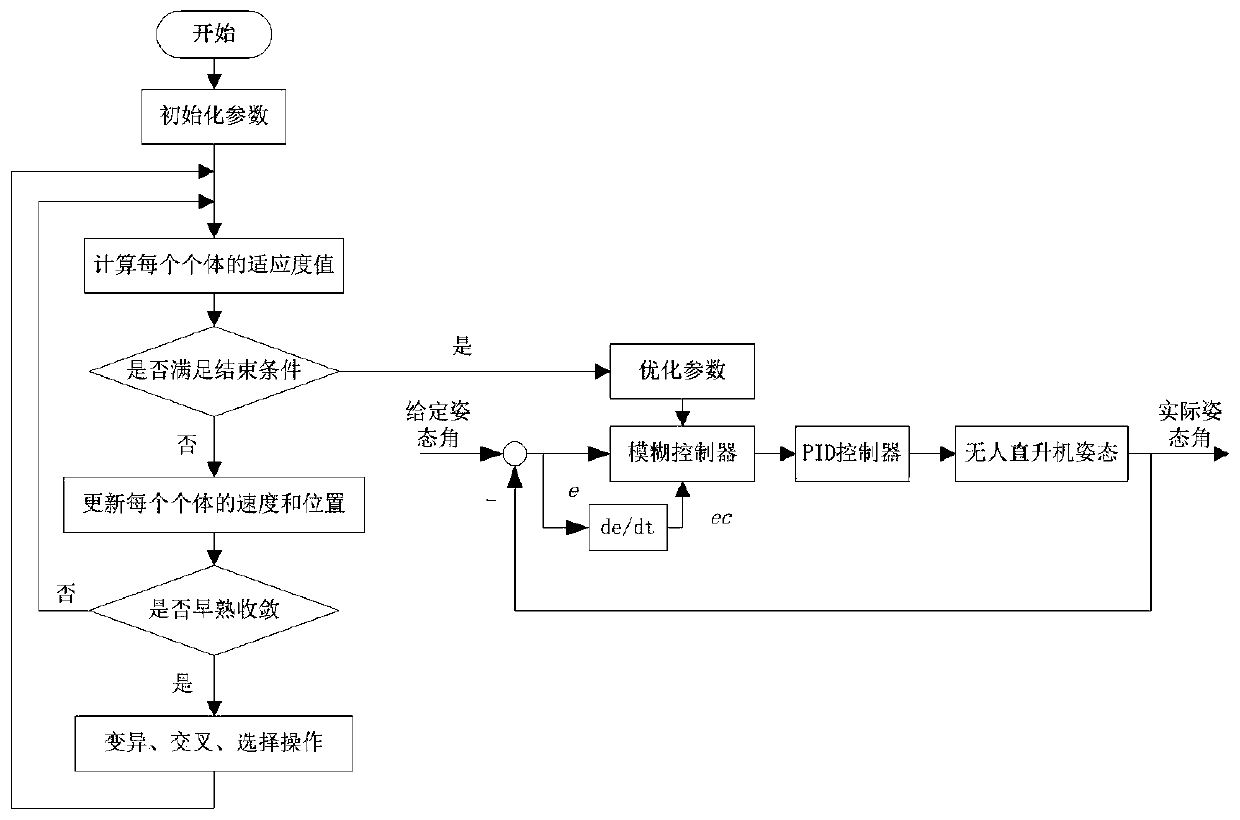
[0017] An improved particle swarm optimization algorithm to optimize the fuzzy PID unmanned helicopter attitude control method, which needs to control the three attitude angles of the unmanned helicopter's pitch angle, roll angle, and yaw angle respectively, and the parameter that needs to be optimized is the quantization in the fuzzy PID controller Factor K e 、K ec and scaling factor K u ={K 1 ,K 2 ,K 3}Five parameters, the steps are basically the same, such as figure 1 As shown, it specifically includes the following steps:
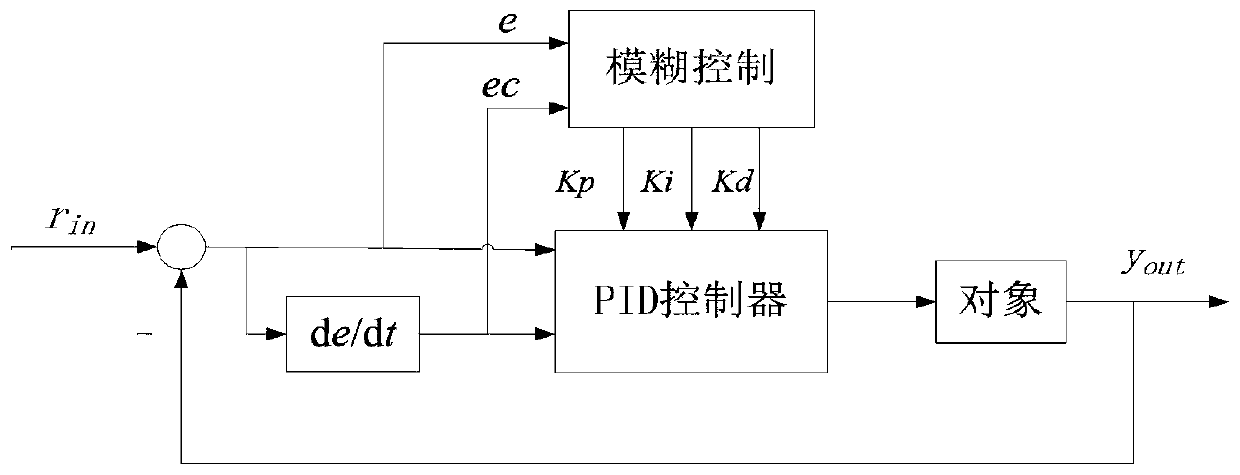
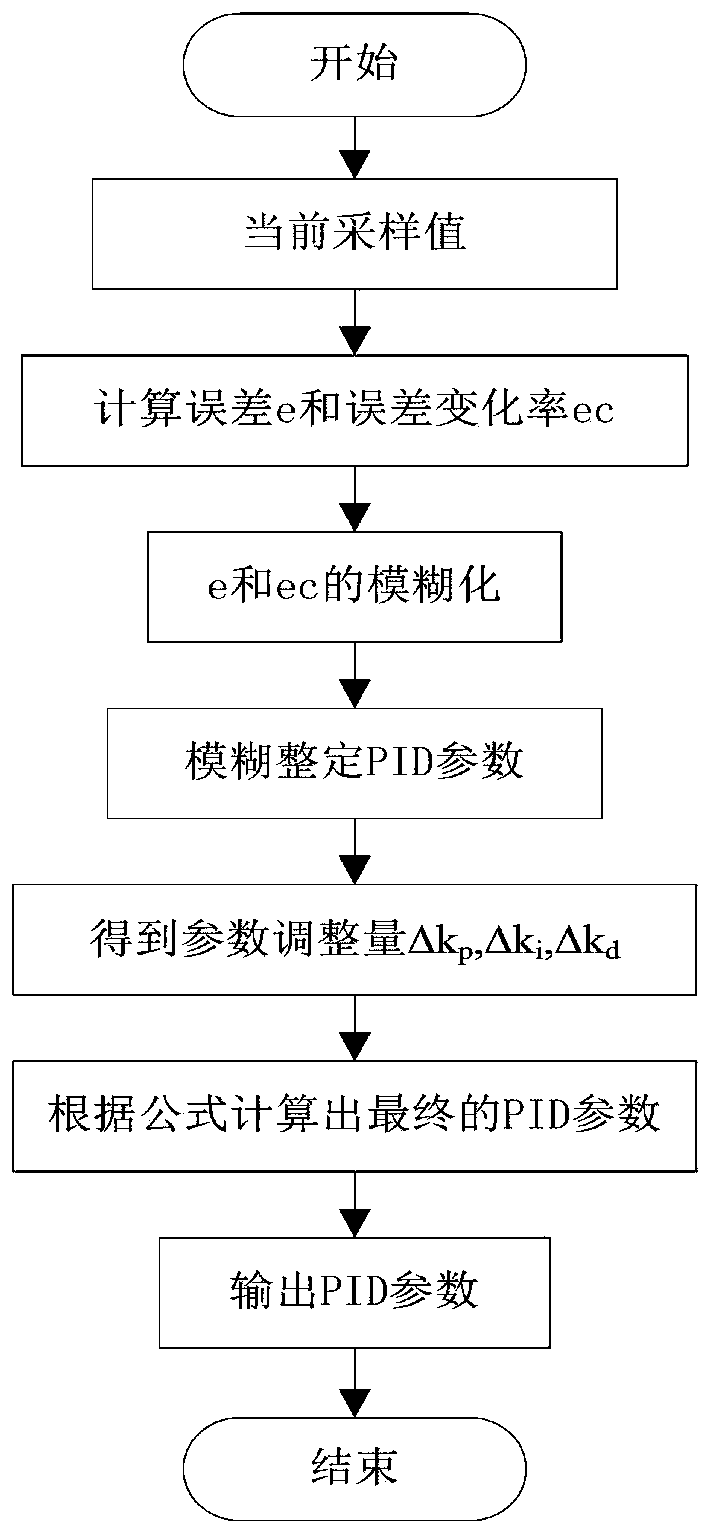
[0018] Step 1, use the mechanism modeling method to obtain the dynamics and kinematics model of the unmanned helicopter, and design the fuzzy PID attitude controller based on the model, the structure is as follows figure 2 As shown, the desired attitude angle of the unmanned helicopter is selected and the actual attitude angle error and its error rate of change As an input variable, the parameter adjustment amount Δk of the attitude angle...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More