

A method for automatically stitching images by adjusting the height of an X-ray detector
A height-adjusting, automatic splicing technology, applied in image enhancement, image data processing, instruments, etc., can solve the problems of large amount of calculation and error-prone splicing, and achieve the effect of reducing difficulty, facilitating correctness, and ensuring the effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
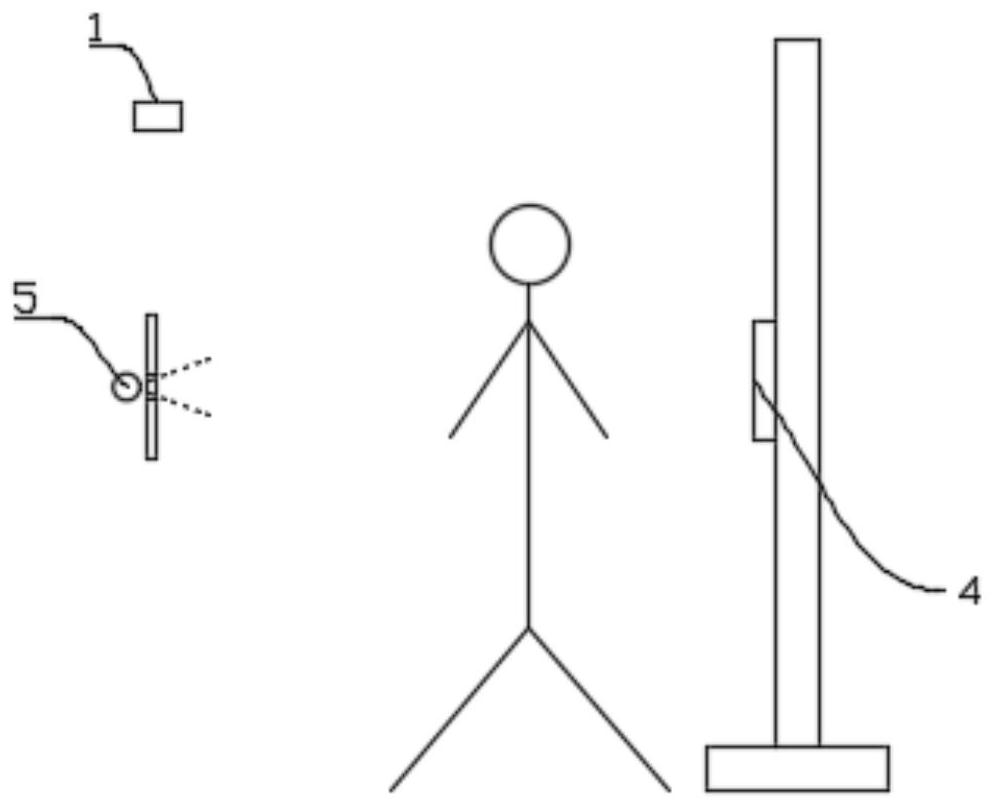
[0037] Such as Figure 1-Figure 6 As shown, this embodiment provides a method for automatic image stitching by adjusting the height of the X-ray detector, including the following steps:
[0038] S1. Calculating the three-dimensional coordinates of the joint points: the binocular camera 1 located in front of the detection position acquires the RGBD image of the human body on the detection position, and obtains the three-dimensional coordinates of the joint points of the human body through calculation. The three-dimensional coordinates of the joint points include the three-dimensional coordinates of the human shoulder joint points 2 and Three-dimensional coordinates of other joint points of several human bodies;
[0039] S2. Calculating the coordinate offset: subtracting the longitudinal coordinate value of the human shoulder joint point 2 from the preset longitudinal coordinate value of the shoulder joint point to obtain the coordinate offset;
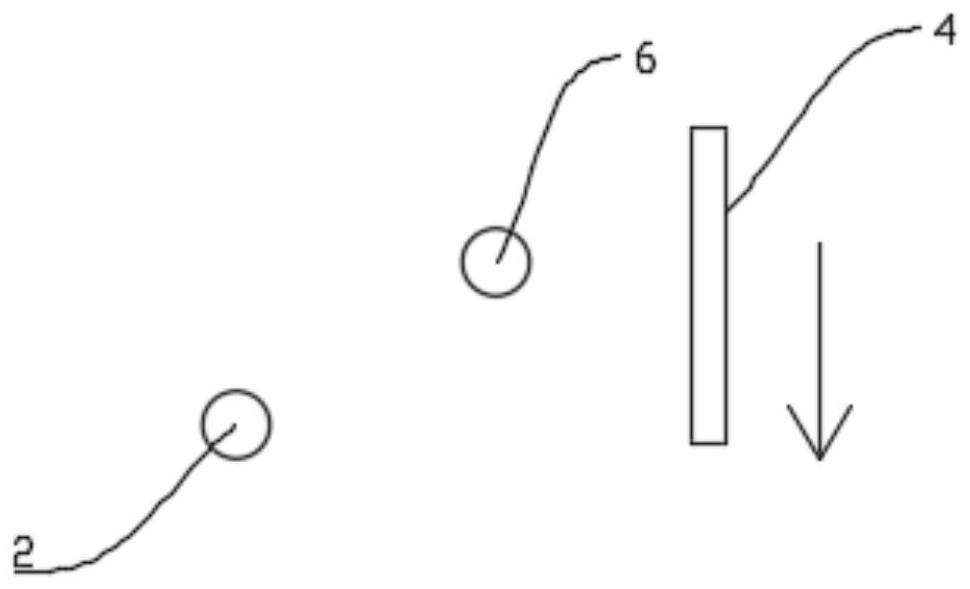
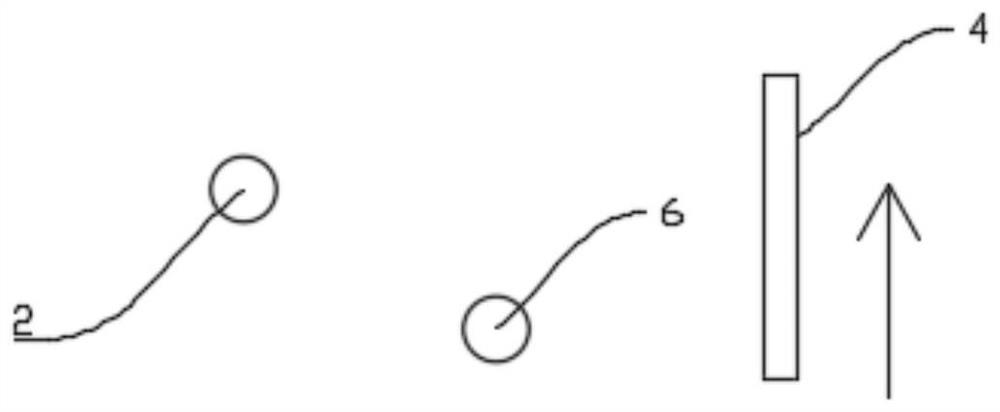
[0040] S3. Initial position pos...
Embodiment 2
[0045] This embodiment is optimized and defined on the basis of the above-mentioned embodiment 1.
[0046] In S1:
[0047] S1.1. Use the binocular camera 1 to shoot the scene at the detection position, collect the RGBD image information of the human body at the detection position, and process the RGBD image information through the processor to obtain an RGB image and a depth image. The depth image includes Image information and depth of field information;
[0048] S1.2. Calculate the positions of several human joint points in the depth image based on the deep learning model of human body joint point detection, and determine the joint point image coordinates of several human body joint points in the depth image;
[0049] S1.3. Calculate the three-dimensional coordinates of the joint points corresponding to the joint point image coordinates according to the joint point image coordinates, the depth of field information and the preset calibration parameters of the binocular camer...
Embodiment 3
[0053] This embodiment is optimized and defined on the basis of the above-mentioned embodiment 1.
[0054] In S6:
[0055] S6.1. Determine alignment point 8: alignment point 8 is joint point 1 8.1 and joint point 2 8.2 in image A 10 and joint point 3 and joint point 4 in image B 11, joint point 1 8.1 and joint point 3 are the human body The same joint point, joint point 2 8.2 and joint point 4 are the same joint point of the human body;
[0056] S6.2. Alignment point 8 matching: joint point 1 8.1 is coincident with joint point 3, joint point 2 8.2 is coincident with joint point 4, and a rectangular overlapping area 9 is obtained;
[0057] S6.3. Perform image fusion on the rectangular overlapping area 9 to obtain a new A image 10. The A image 10 and the next B image 11 continue the splicing steps of the above S6.1 and S6.2 until all the images are completely relied on .
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More