

Soft and hard gripper suitable for multi-shape and multi-scale objects
A soft plus hard, multi-scale technology, applied in the direction of manipulators, program-controlled manipulators, chucks, etc., can solve the problems of limited size microcosmic tweezers opening and closing range, limited size application range, complex gripper structure, etc., to achieve the release process Simple and reliable, low cost, and simple structure of the gripper
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The content of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
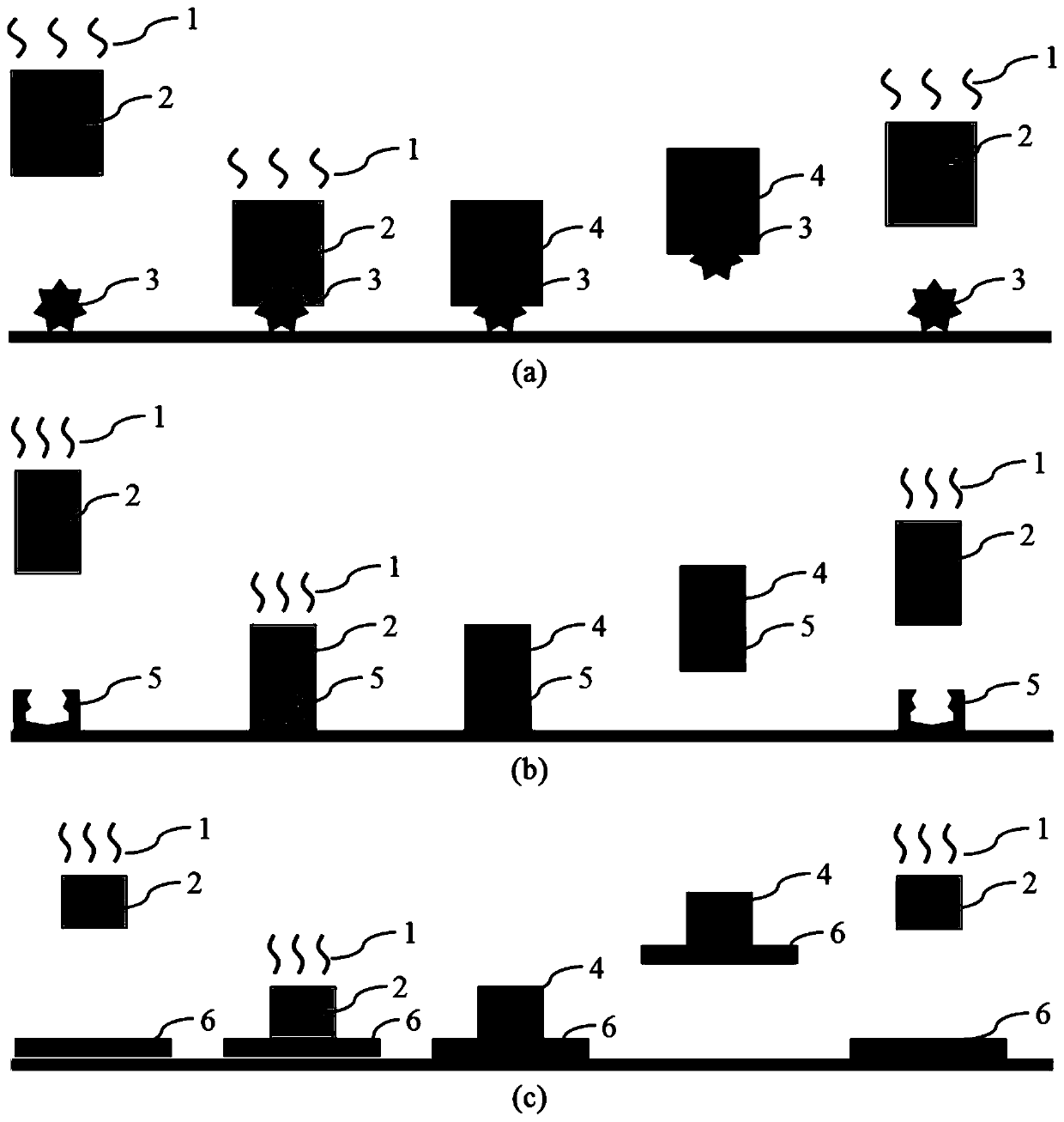
[0035] As an example, but not to limit the scope of the invention, figure 1 It is a schematic diagram of the principle of grabbing-releasing an object of any shape using a shape-memory polymer gripper proposed in the present invention.
[0036] figure 1 a shows the process of using a shape memory polymer gripper to grasp an object with a convex shape. When grabbing a convex-shaped object, the shape-memory polymer is first transformed into a soft low-modulus state under the action of an external load, and then the convex-shaped object is embedded in the shape-memory polymer gripper. When the applied load is removed, the shape memory polymer transforms into a hard, high-modulus glass state and maintains this deformed state, holding the object in place. The force of this fixation allows the object to be grasped and manipulated. When it ne...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More