

Four-wheel wall-climbing robot with curved surface adsorption function and use method thereof
A wall-climbing robot and curved surface technology, applied in motor vehicles, transportation and packaging, etc., can solve the problems of heavy weight, difficult adsorption force, large external size, etc., and achieve the effect of strong adaptability to curved surfaces
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] Embodiments of the present invention will be described in further detail below in conjunction with the accompanying drawings.
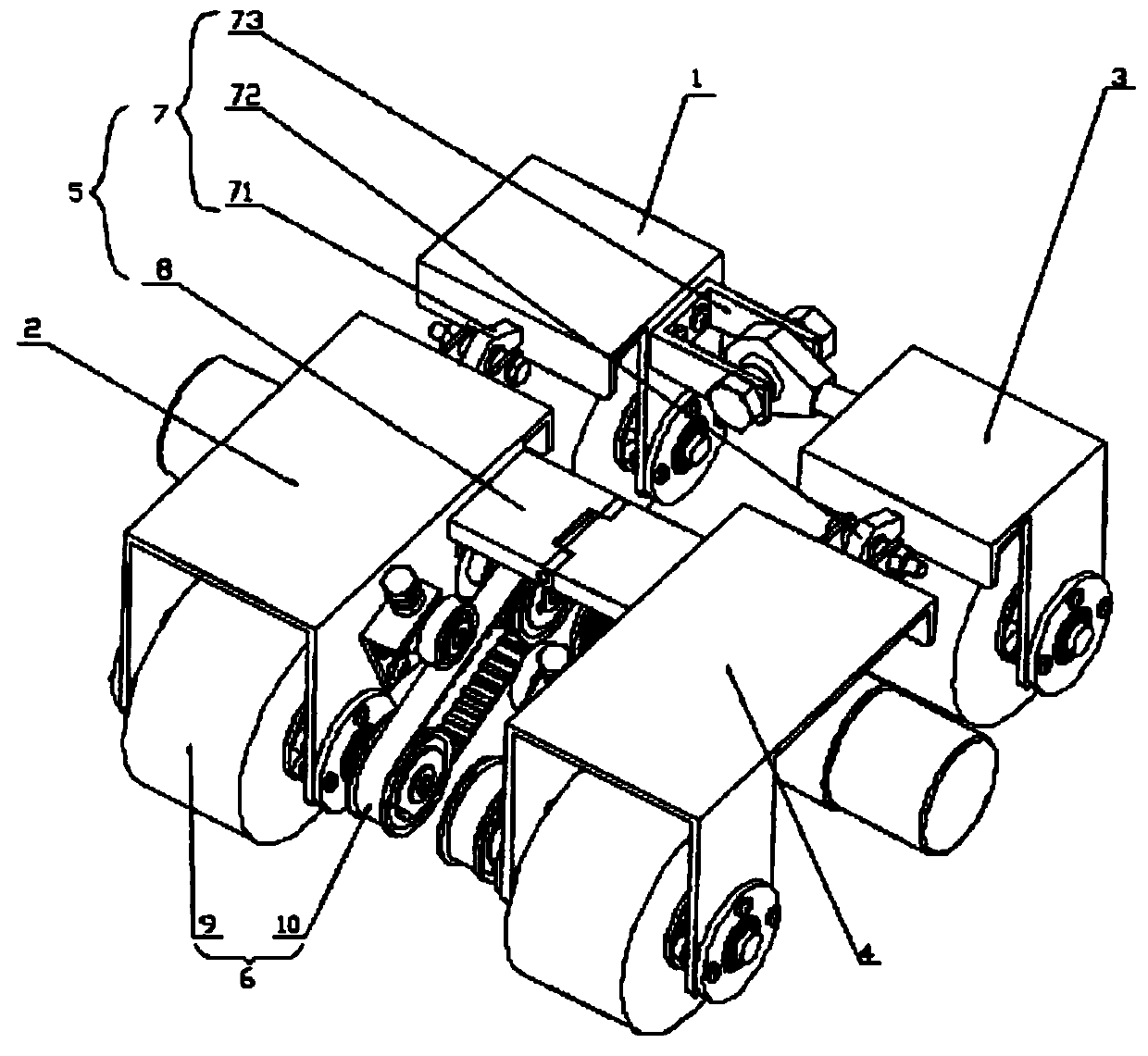
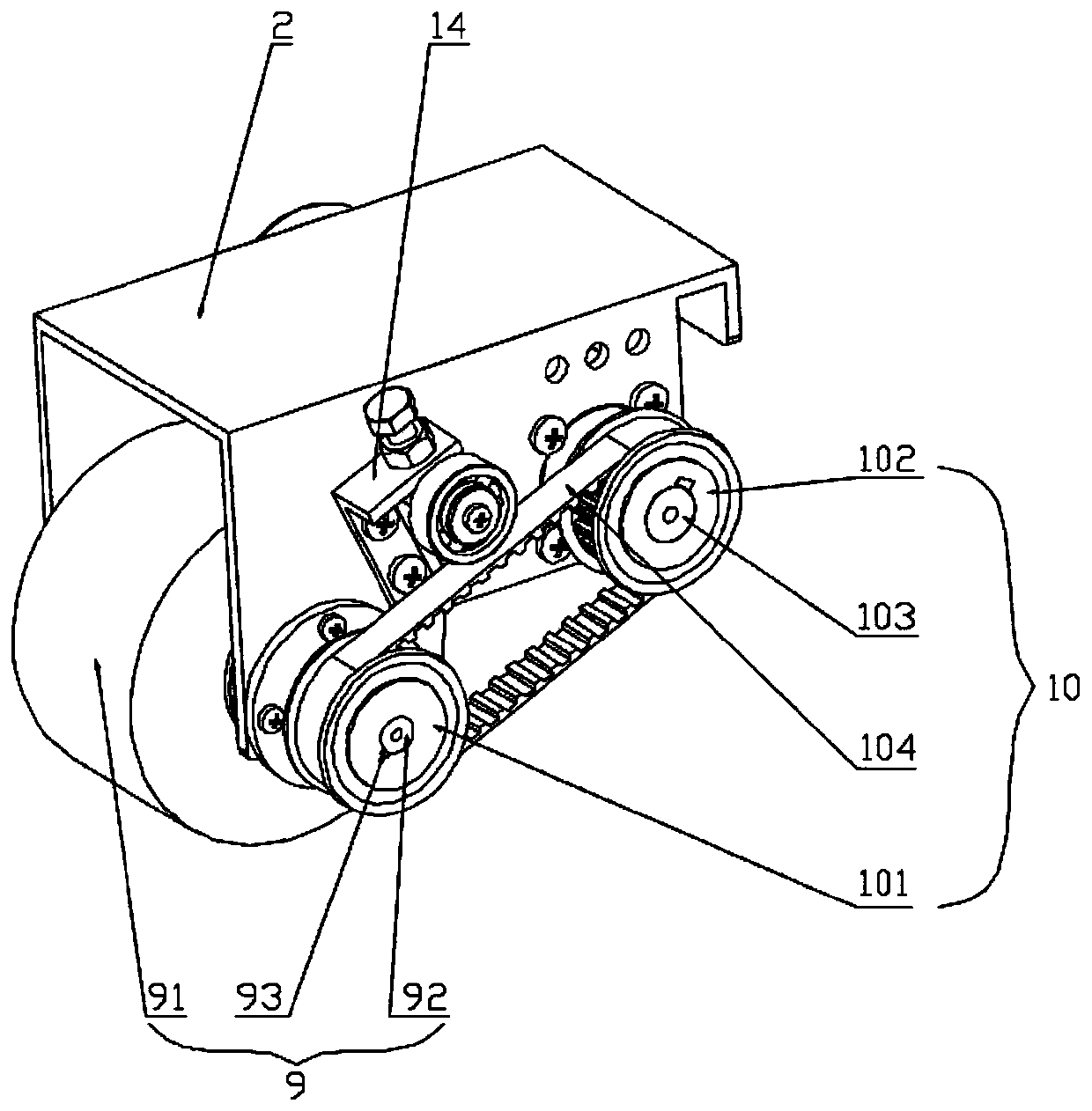
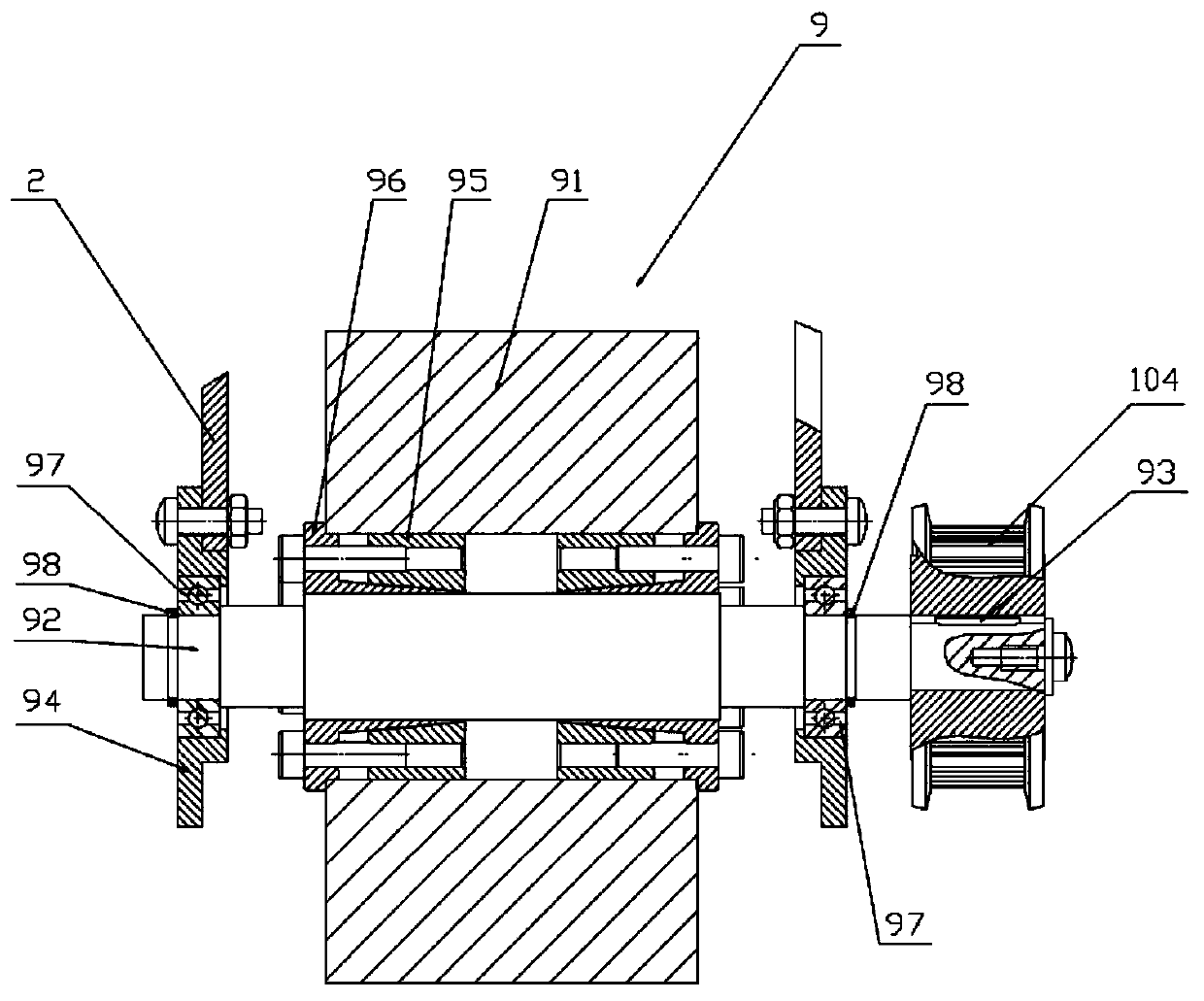
[0039] Such as Figure 1-Figure 8 Shown, the present invention is, wherein: comprise left front vehicle frame 1, left rear vehicle frame 2, right front vehicle frame 3, right rear vehicle frame 4 and curved surface adaptive mechanism 5, described left front vehicle frame 1 and right front vehicle frame 3 The structure is the same, the left rear vehicle frame 2 and the right rear vehicle frame 4 have the same structure, and a permanent magnet wheel adsorption mechanism 9 with the same structure is installed under each vehicle frame, and the left rear vehicle frame 2 and the right rear vehicle frame A power transmission mechanism 10 with the same structure is also installed on the frame 4. The curved surface adaptive mechanism 5 includes a deflection mechanism 7 and a hinge 8. The deflection mechanism includes a first deflection mechanism 71 and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More