

Curved surface movable adsorption processing robot and adsorption working method thereof
A technology of robots and processing tools, which is applied in the direction of manipulators, motor vehicles, manufacturing tools, etc., can solve the problems of limited robot poses and inaccessible processing positions, and achieve the effect of wide range of applicable curved surfaces, simple structure, stable and reliable adsorption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention. In addition, the technical features involved in the various embodiments of the present invention described below can be combined with each other as long as they do not constitute a conflict with each other.
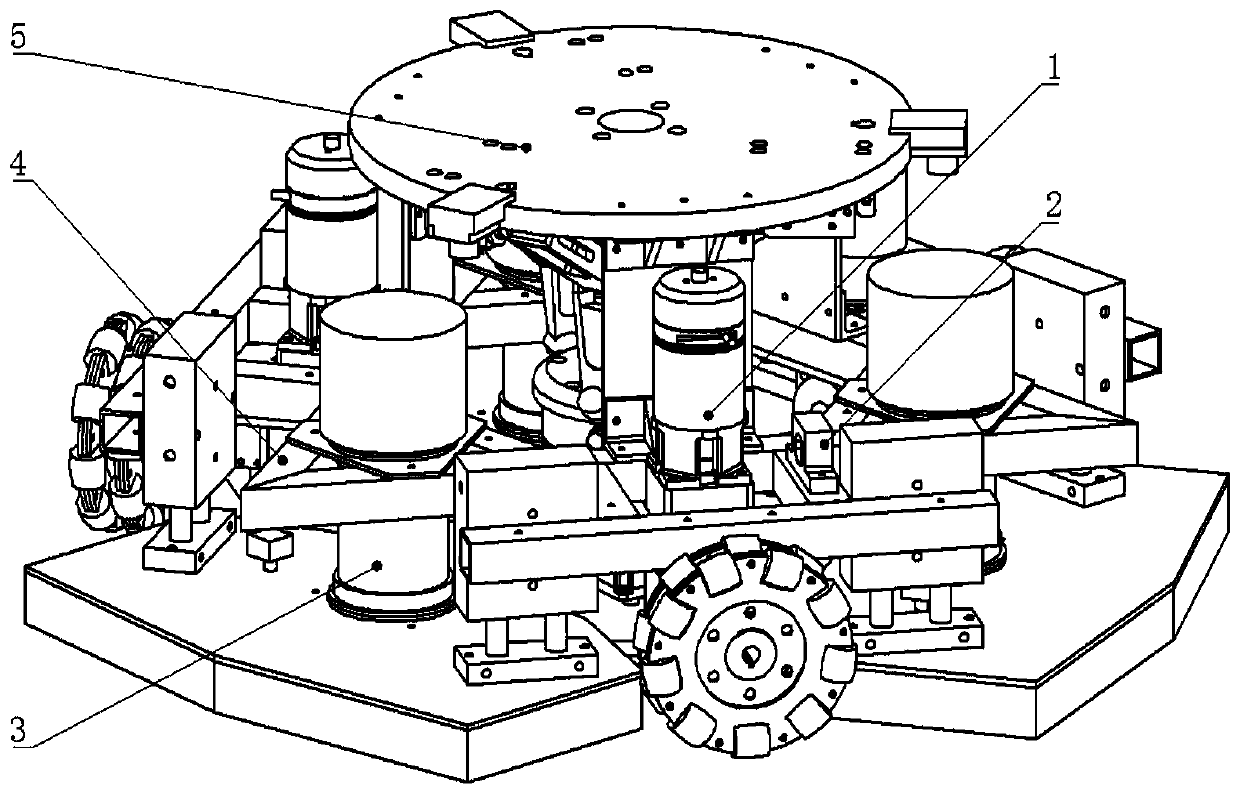
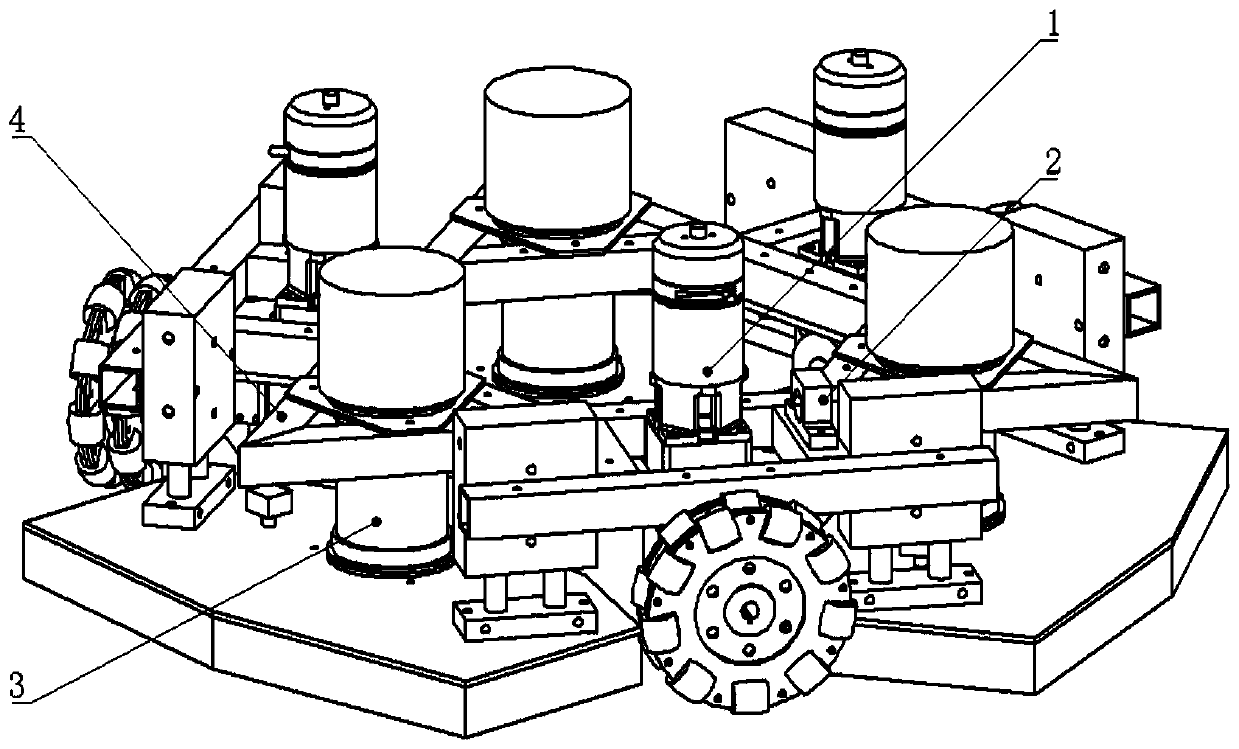
[0039] The invention provides a robot capable of adsorbing, climbing, and processing curved surfaces. The robot uses a flexible adsorption cavity with passive compliance and a three-wheel chassis to absorb and move on the surface of the component, aiming at the surface characteristics of the free curved surface of a large complex component, and Complete the corresponding processing tasks through...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More