

Robot navigation method, robot and storage device
A navigation method and robot technology, applied in the field of robot navigation method, robot and storage device, can solve the problems of no longer intelligent and flexible, large amount of processor calculation, large amount of calculation, etc., achieve flexible navigation, reduce calculation amount, and reduce cpu The effect of occupancy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] In order to make the purpose, technical solution and effect of the present application more clear and definite, the present application will be further described in detail below with reference to the accompanying drawings and examples.
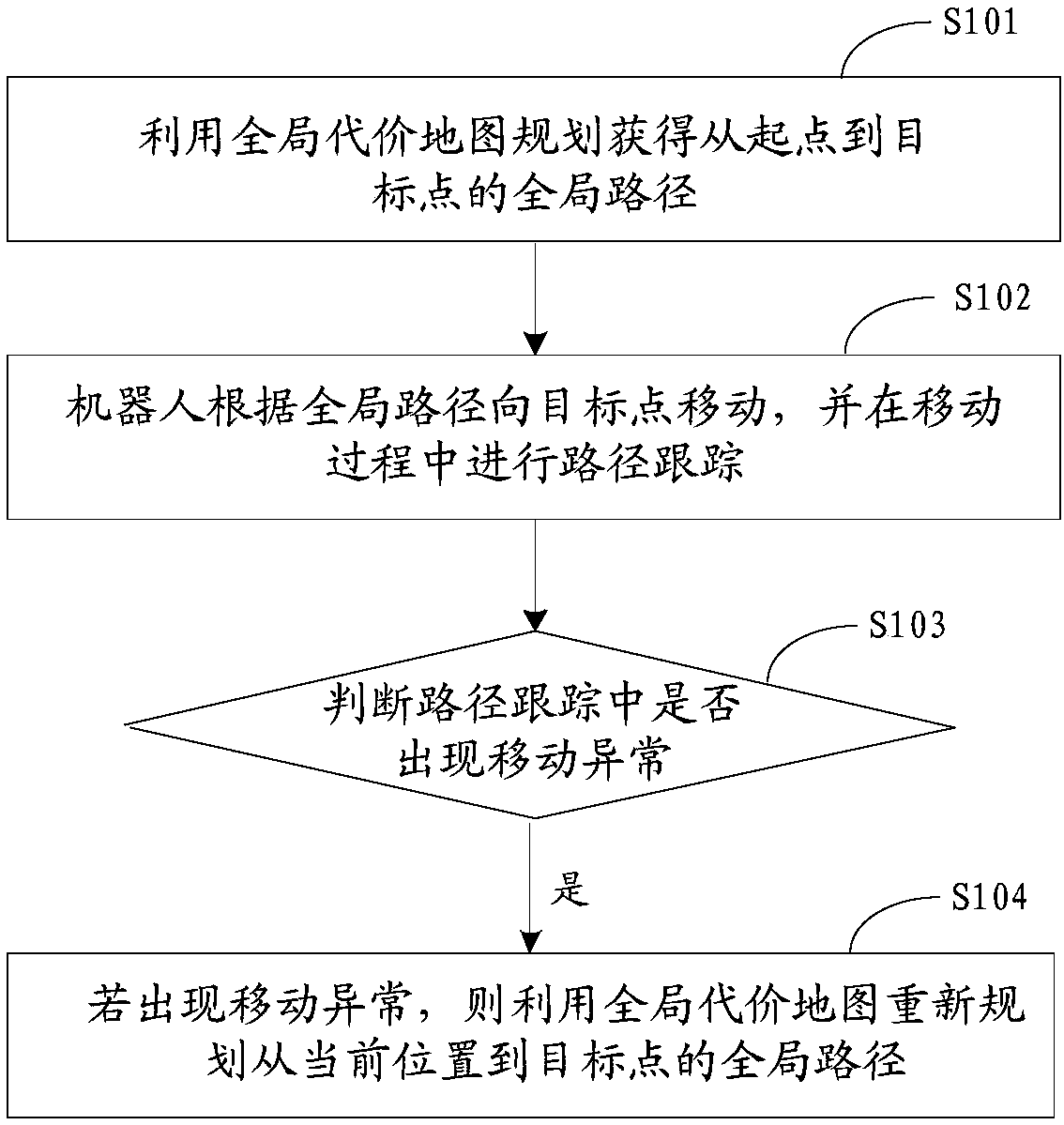
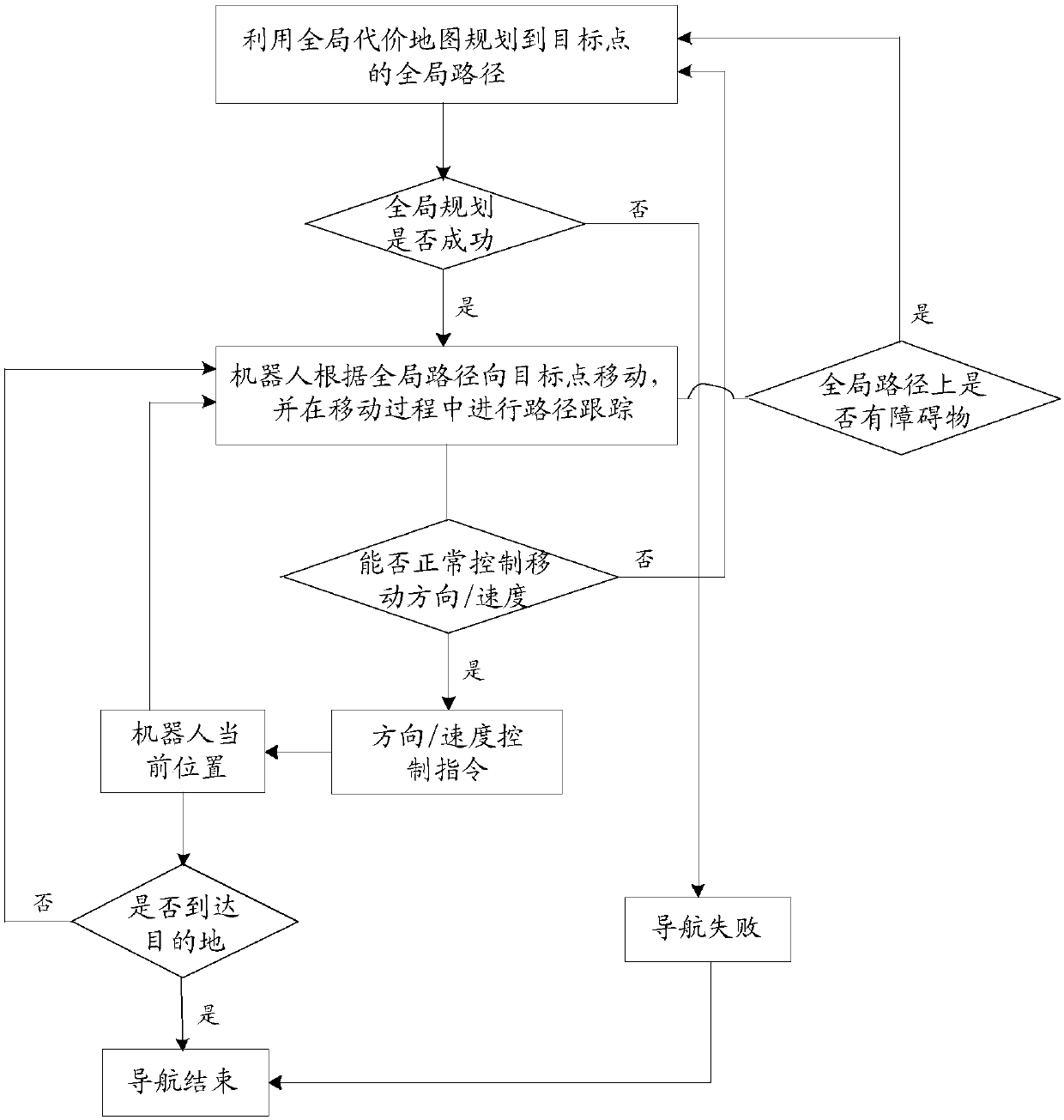
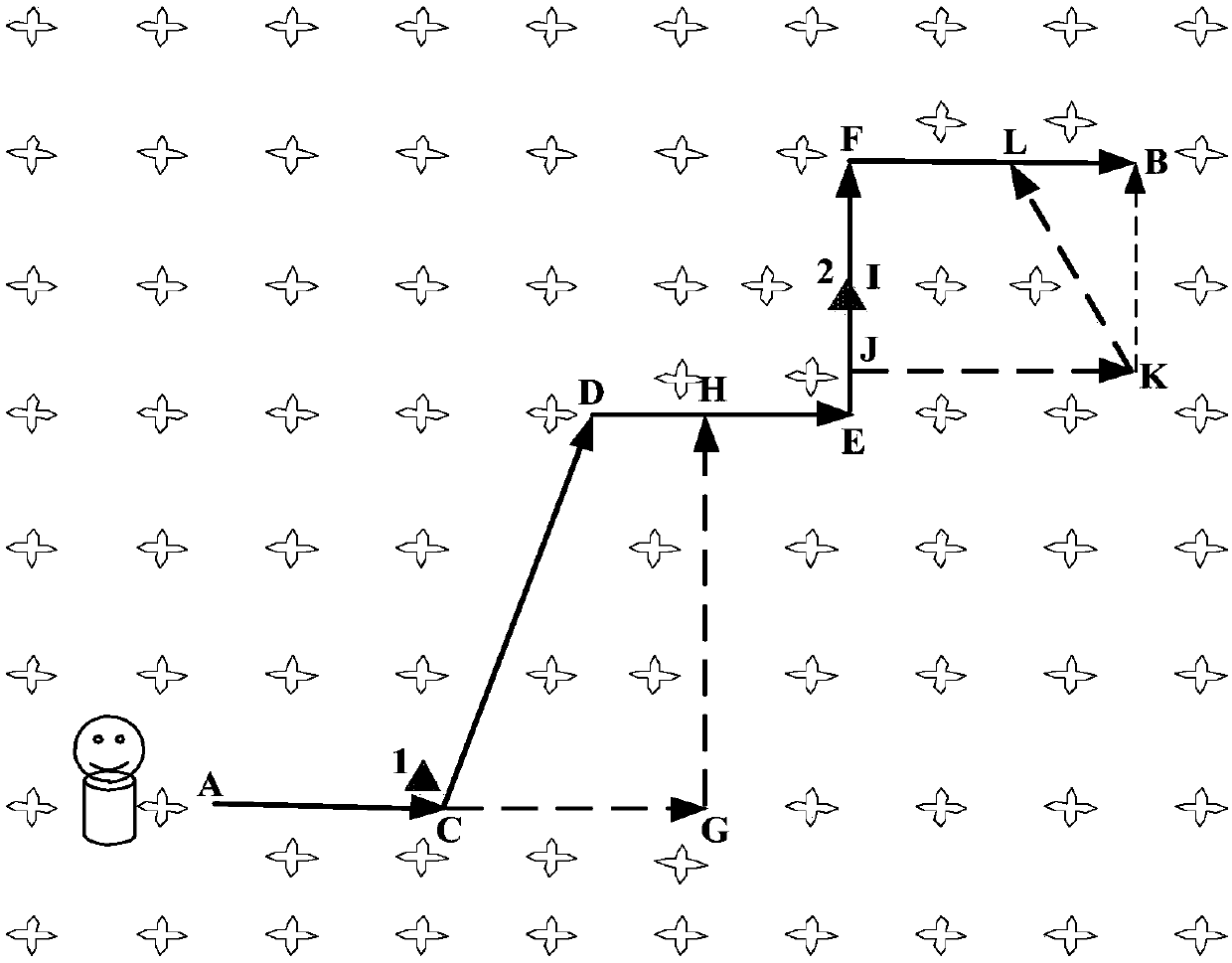
[0016] The present application provides a robot navigation method, which can at least be applied to the navigation of indoor robots, such as sweeping robots and working robots. In the robot navigation method provided by this application, after the global path is planned globally, it is no longer necessary to update and adjust the overall planning scheme in real time according to the surrounding environment; instead, it is only necessary when the robot moves abnormally (such as encountering an obstacle, the global path does not allow the robot to pass) etc.) will adjust the overall plan. Through this method, the real-time monitoring of the global environment is omitted, the amount of calculation is greatly reduced, the navigation is more...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More