

A universal motion platform for highly adaptable robots for complex nuclear environments
A complex environment and motion platform technology, applied in the field of robotics, can solve the problems of no landing buffer considerations, etc., to achieve the effect of convenient turning in place, large rotation range and robot height adjustment range, and reduced envelope size
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
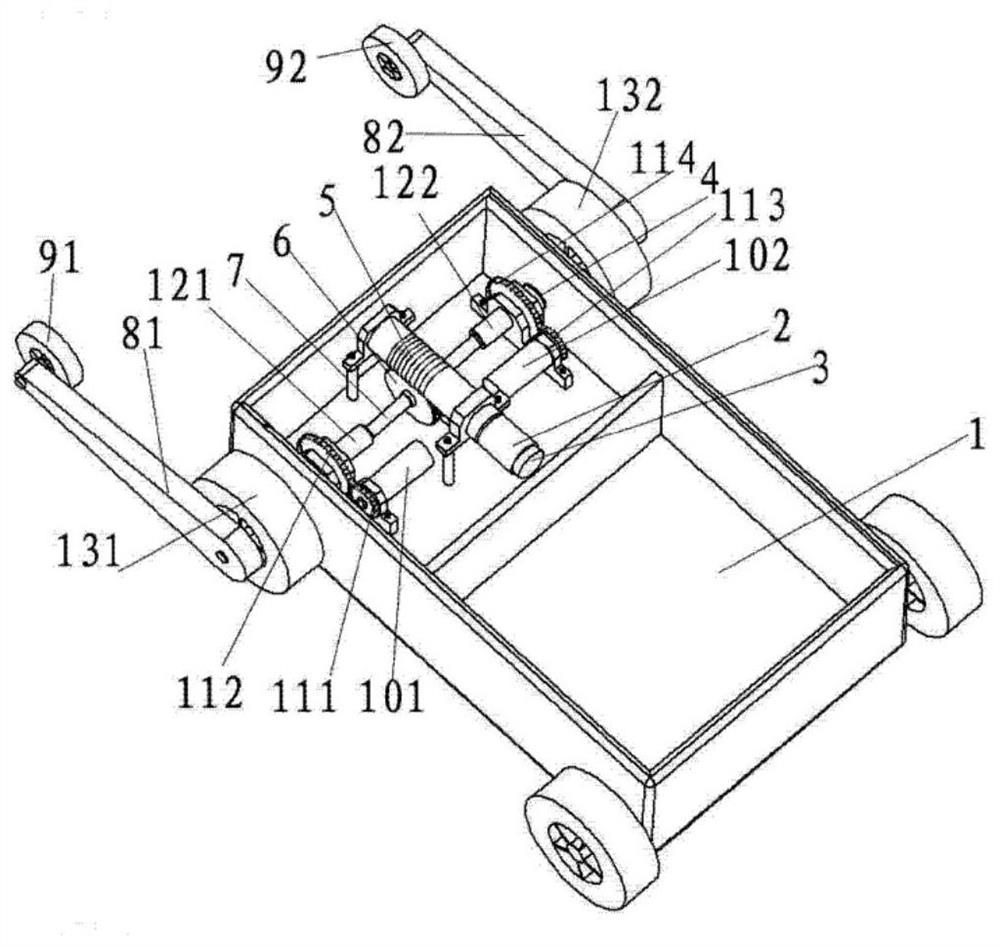
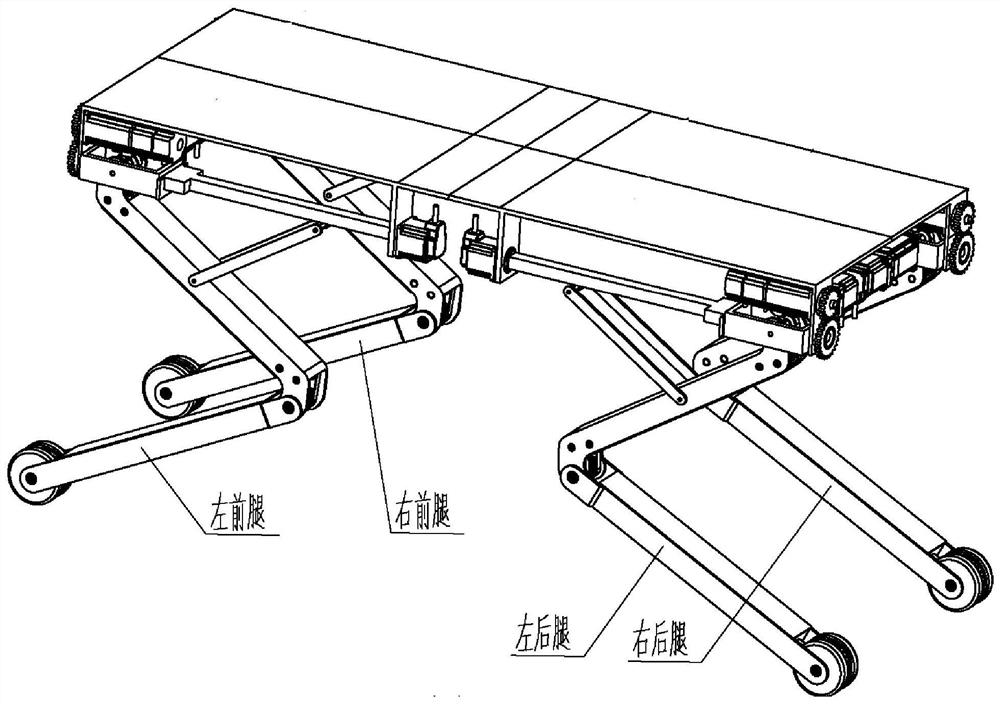
[0050] As shown in the figure, the outer layer of the robot is designed with a shielding protective shell, and its internal structure mainly includes four multi-degree-of-freedom robot leg systems, and each robot leg system has four degrees of freedom. With the robot body as the base, the 4 degrees of freedom are the hip joint "abduction / adduction" and "extension / bend", the knee joint "extension / bend", and the roller at the end of the leg kinematics;
[0051] The four legs of the robot adopt a unified modular design and are distributed symmetrically. Taking the left hind leg as an example, the internal structure is described.
[0052] Two mounting plates protrude from the lower side of the mounting base plate of the left rear leg, which are respectively connected to the ball screw mounting rod seat and the hip joint "abduction / adduction" motion base through a pair of bearings;
[0053] The driving motor of the hip joint "abduction / adduction" and its integrated reduction box ar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More