Robust fault-tolerant tracing method of unmanned helicopter
A technology of unmanned helicopters and helicopters, applied in the direction of non-electric variable control, instruments, attitude control, etc., can solve the problems of loss, control law is difficult to achieve performance indicators, increase, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0088] The technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings.
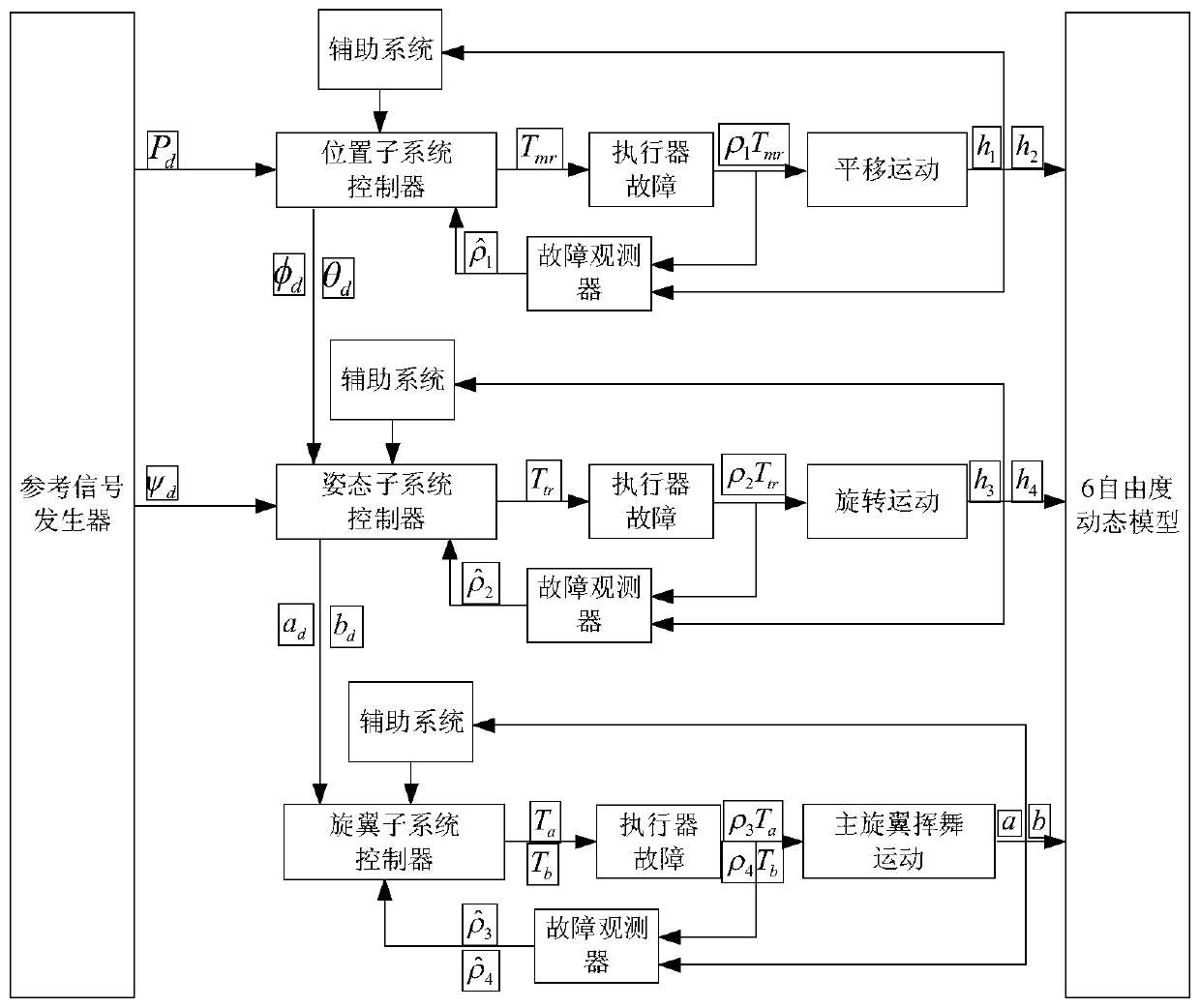
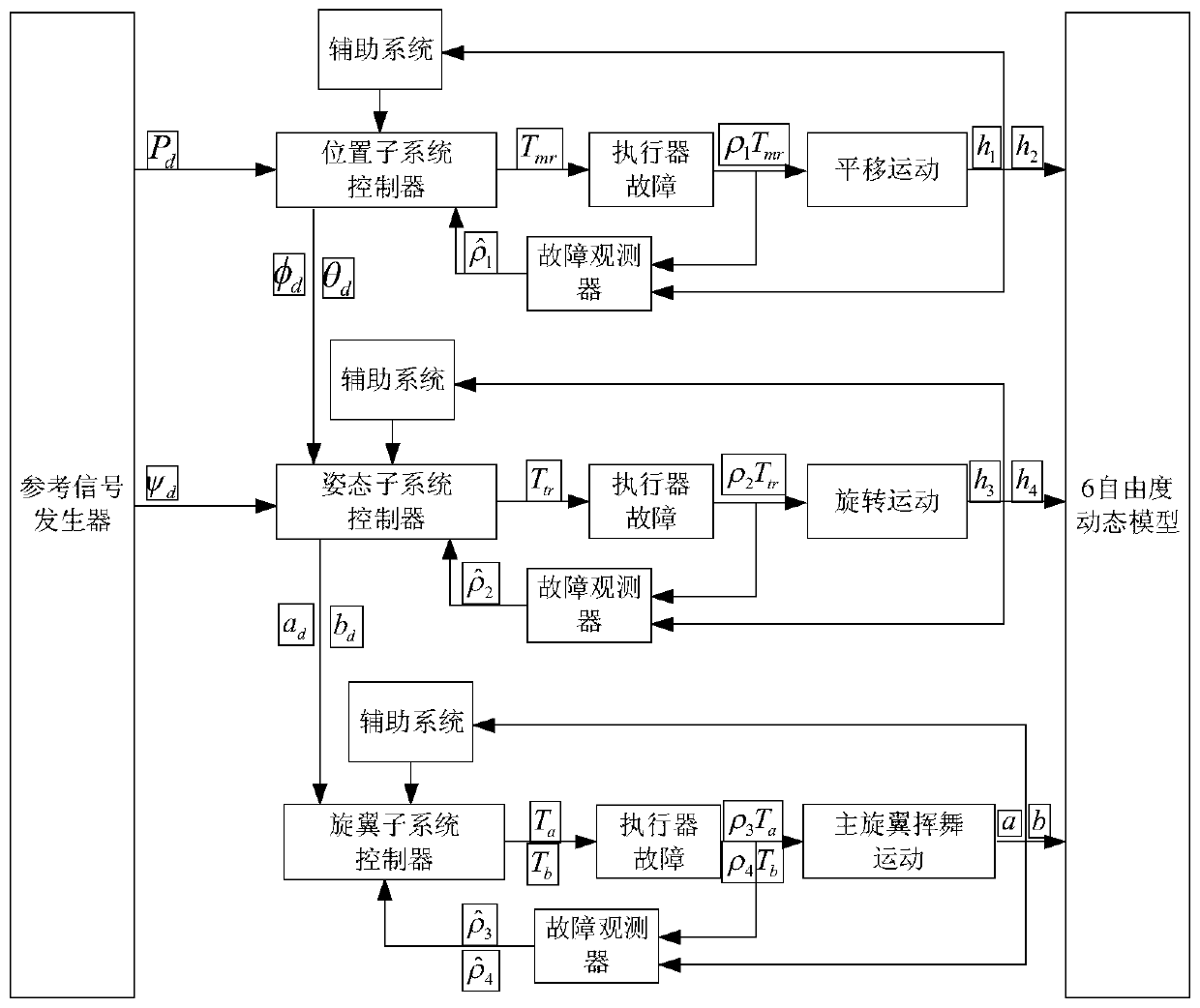
[0089] 1. System model
[0090] In this paper, the following nonlinear system model of unmanned helicopter is considered:
[0091]
[0092] In the formula, m is the mass of the helicopter, g is the acceleration due to gravity, e=[0,0,1] T , h 1 =[X g ,Y g ,Z g ] T is the position vector of the helicopter, h 2 =[u,v,w] T is the velocity vector, h 3 =[φ,θ,ψ] T is the attitude angle vector, h 4 =[p,q,r] T is the attitude angular rate vector, X g ,Y g ,Z g Respectively represent the components of the position of the helicopter in each direction of the three-dimensional space, u, v, w respectively represent the components of the speed of the helicopter in each direction of the three-dimensional space, φ, θ, ψ represent the roll angle, pitch angle and yaw angle of the helicopter respectively , p, q, r represent the roll rate, pi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com