

Pose estimation method based on RGB-D and IMU information fusion
A pose estimation and residual technology, applied in the field of pose estimation based on RGB-D and IMU information fusion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
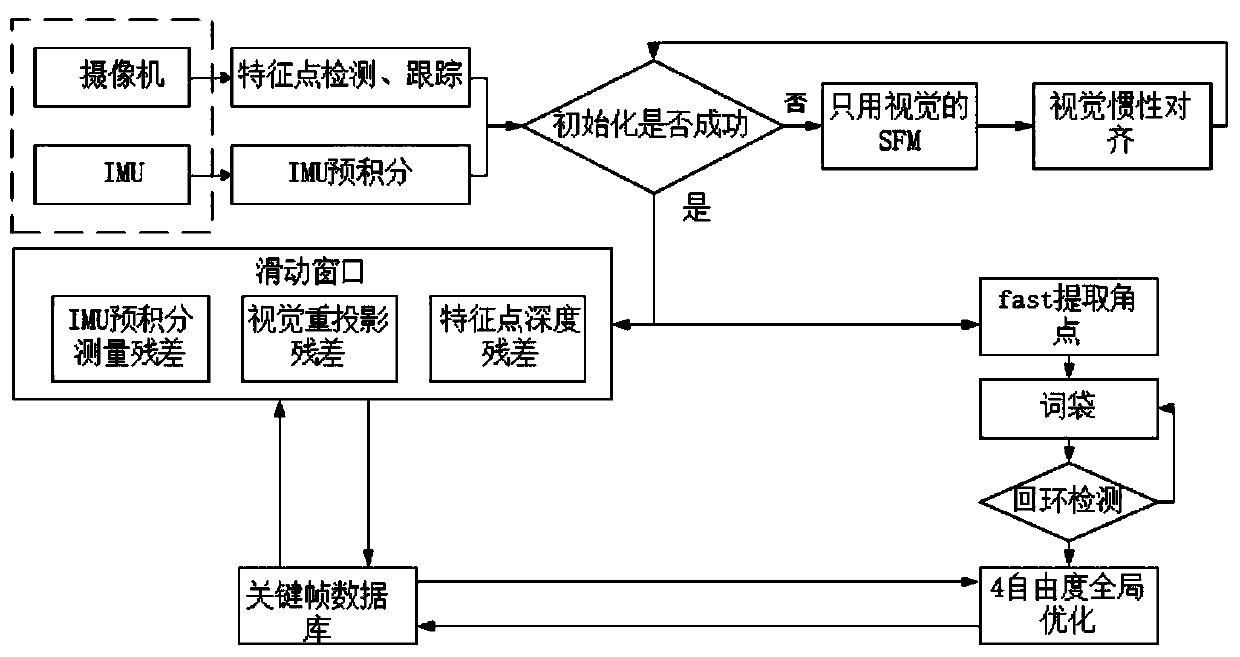
[0111] The overall framework of a method for pose estimation based on RGB-D and IMU information fusion is as follows: figure 1 shown.
[0112] The pose estimation algorithm of the RGB-D and IMU information fusion pose estimation system (hereinafter referred to as the system) can be divided into four parts: data preprocessing, visual inertial navigation initialization, back-end optimization and loop detection. The four parts are taken as independent modules, which can be improved according to requirements.
[0113] Data preprocessing part: It is used to process the grayscale image and depth image collected by the RGB-D camera, as well as the acceleration and angular velocity information collected by the IMU. The input of this part contains grayscale image, depth image, IMU acceleration and angular velocity information, and the output contains adjacent matching feature points and IMU state increment.
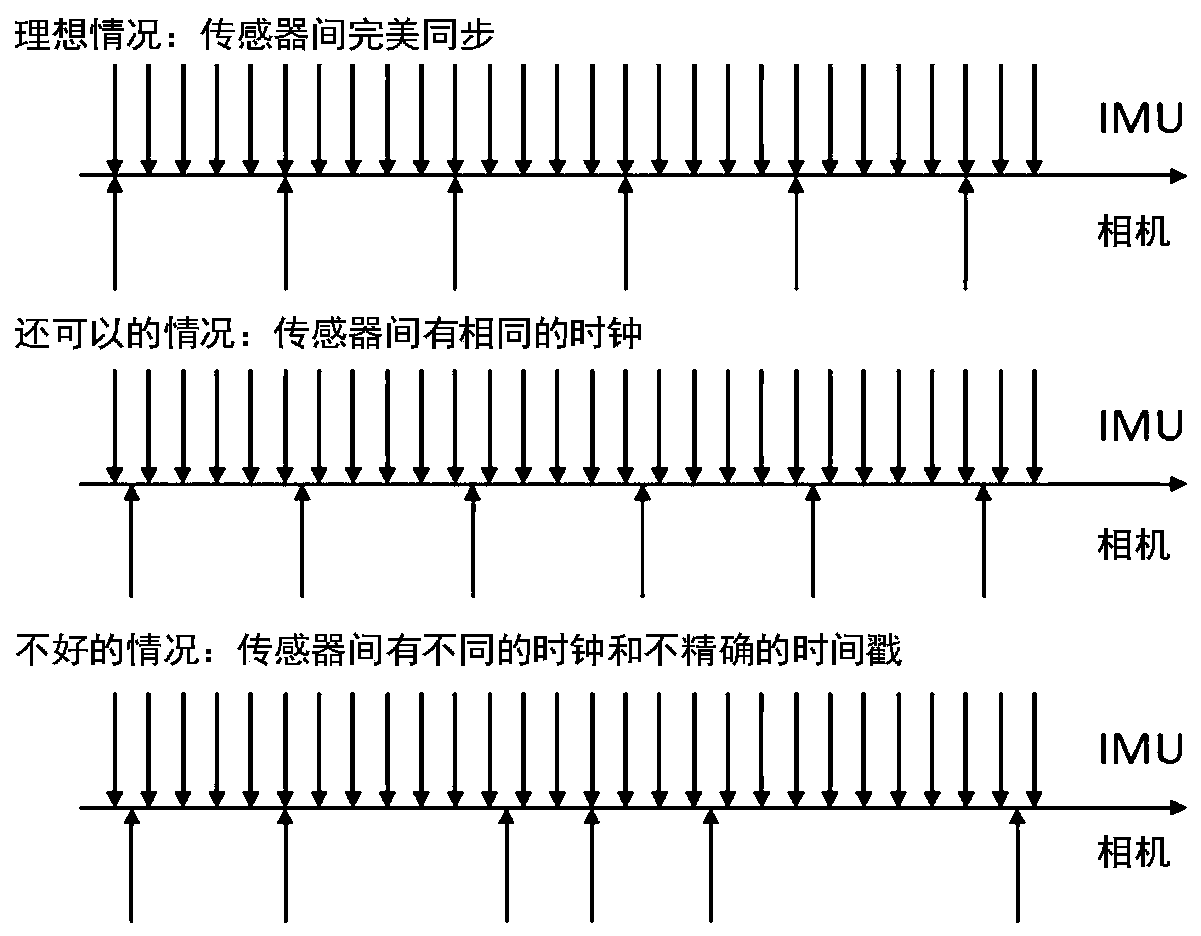
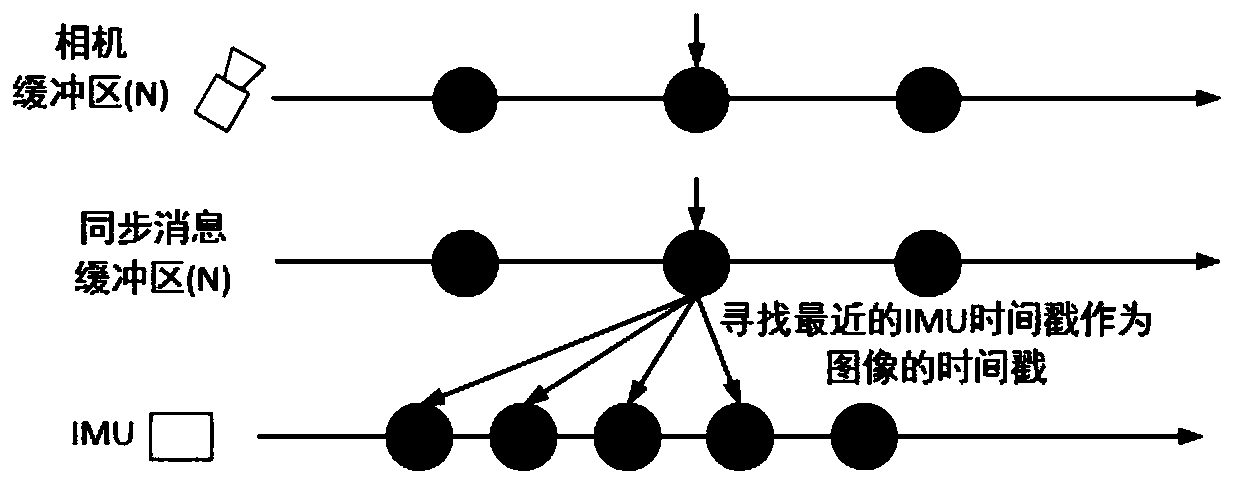
[0114] Specifically: since the camera and the IMU have two clock sources,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More