

Self-adjusting control method for motor servo system considering input limitation
A servo system and control method technology, applied in the field of motor servo system, can solve the problems of inability to perform parameterization processing, inability to input limited effective processing, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0072] In the invention, a self-regulating control method of a motor servo system considering input limitation is provided, comprising the following steps:
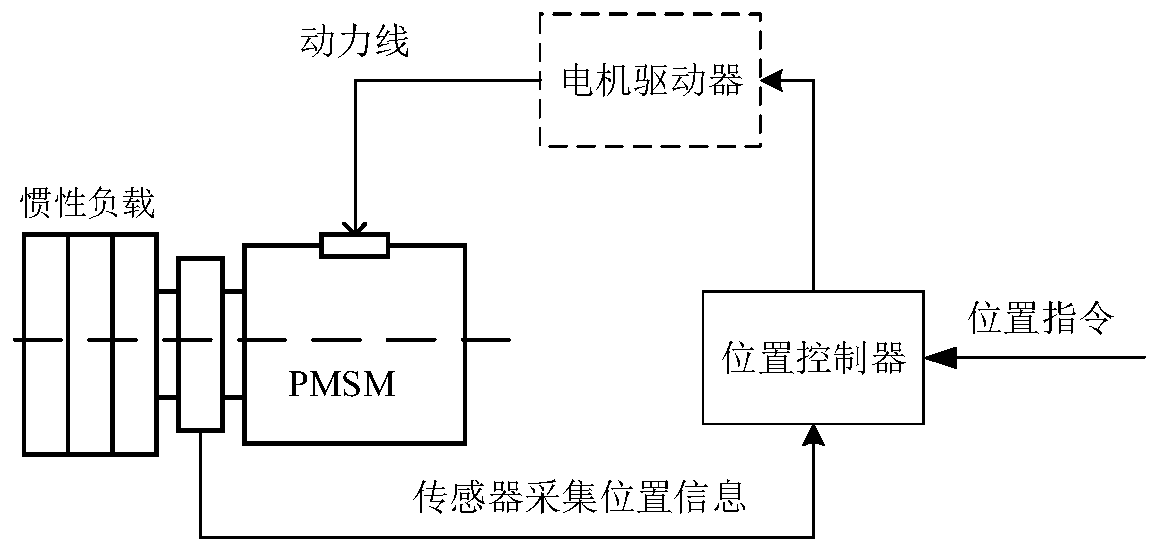
[0073] Step A, establishing the motor position servo system model;
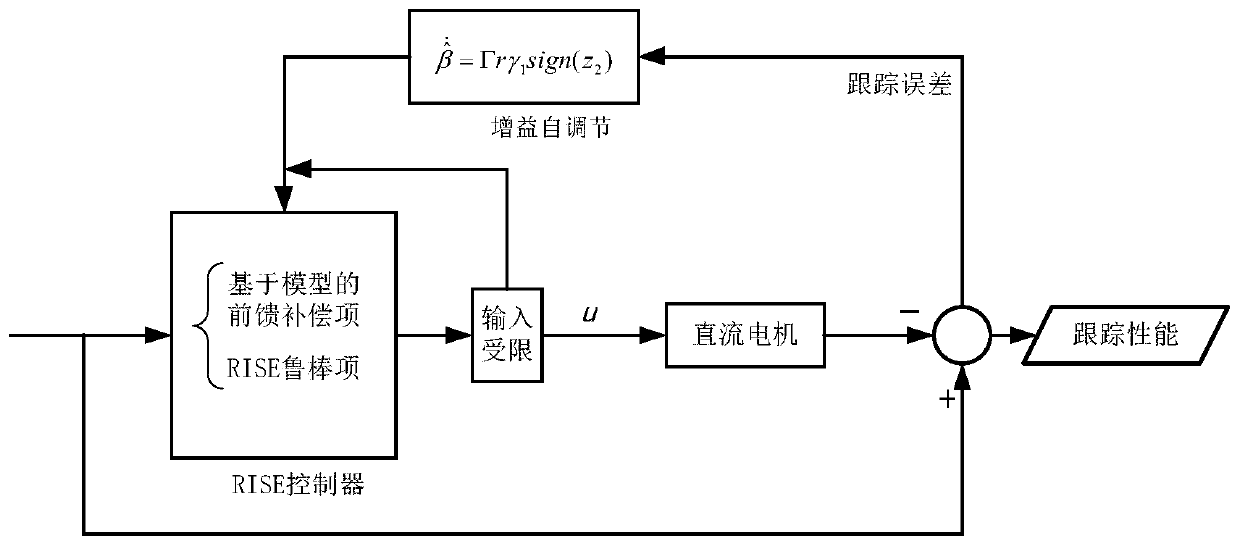
[0074] Step B, designing an error sign integral robust controller based on gain self-adjustment;
[0075] Step C, according to the error sign integral robust controller, use Lyapunov stability theory to prove the stability of the motor servo system, and use the Barbalat lemma to obtain the result of the global asymptotic stability of the system.
[0076] In this paper, the relevant symbols are explained as follows: the symbol with a · on top represents the first derivative, and the symbol with two · above represents the second derivative. The elements in the matrix are no longer described one by one.
[0077] In step A: set up the motor position servo system model, according to Newton's second law, the dynamic model equation of motor inertial load is: ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More