

Flexible wearable hand rehabilitation robot driven by memory alloy wire
A memory alloy wire and rehabilitation robot technology, applied in passive exercise equipment, physical therapy, etc., can solve problems such as safety, reduced portability, high weight, and potential safety hazards, and achieve improved portability and wearability, and overall structure Compact and safe effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
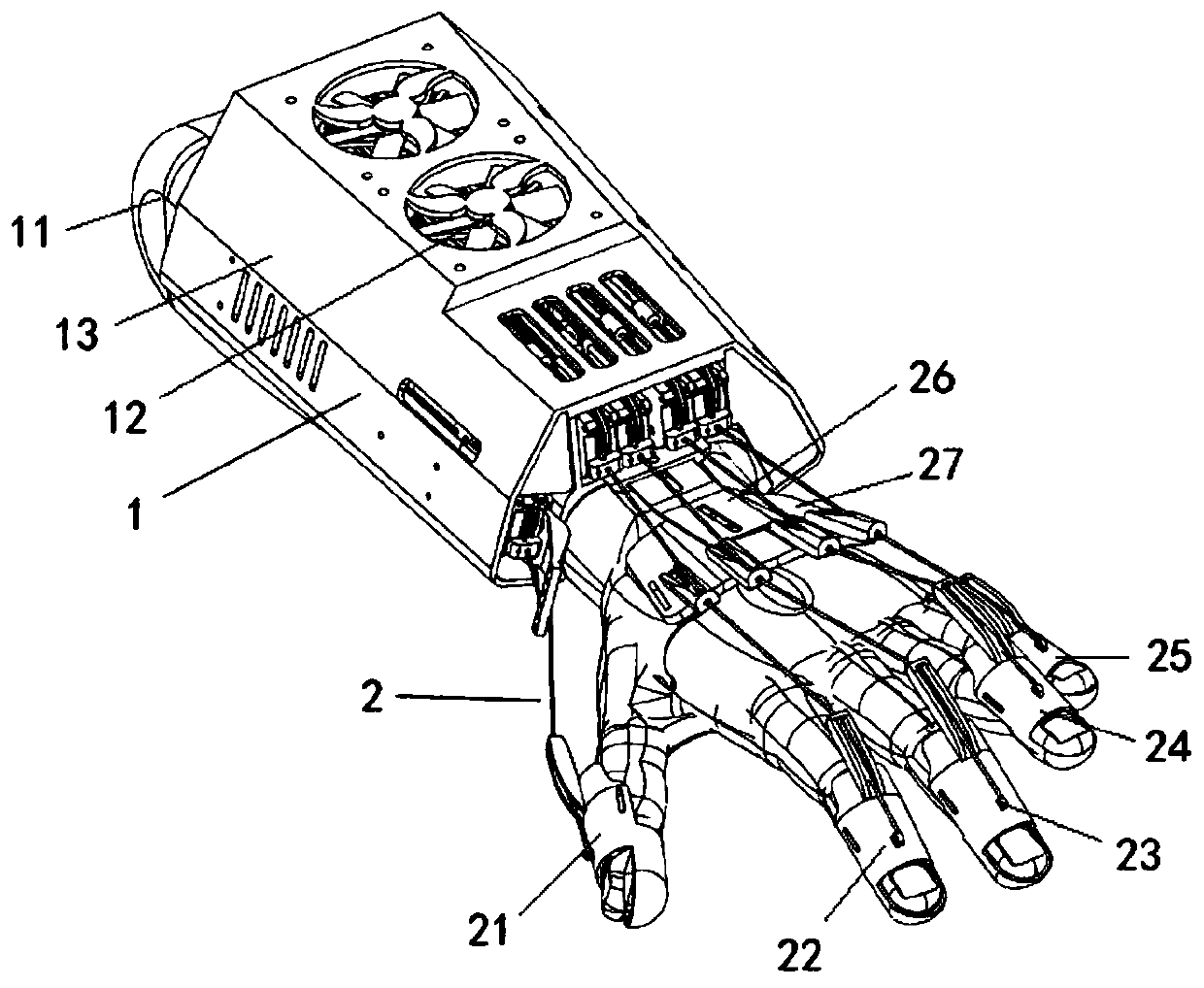
[0030] Such as figure 1 As shown, a flexible wearable hand rehabilitation robot driven by a memory alloy wire provided by the present invention includes a drive part 1 and an execution part 2, wherein the execution part 2 includes a thumb part 21, an index finger part 22, a middle finger part 23, and a ring finger part 24. The little finger part 25, the connecting plate 26 and the back of the hand plate 27, wherein the back of the hand plate 27 is connected with the driving part 1 through the connecting plate 26, the thumb part 21, the index finger part 22, the middle finger part 23, the ring finger part 24 and the little finger part 25 have the same structure, All include wire guides, rigid wires and finger cots, wherein the wire guides of the th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More