

Method and system for automatic detection of parts based on industrial robots
An industrial robot and automatic detection technology, which is applied in the direction of instruments, measuring devices, scientific instruments, etc., can solve the problems of unstable detection results, difficult management of inspection tools, long detection time, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0044] It should be noted that, in the case of no conflict, the embodiments and features in the embodiments of the present invention can be combined with each other.
[0045] In addition, the industrial robot mentioned in the embodiments of the present invention refers to a robot equipped with a vision system or a camera device, which is widely used to detect defects of parts (such as auto parts).
[0046] The present invention will be described in detail below with reference to the drawings and in combination with embodiments.
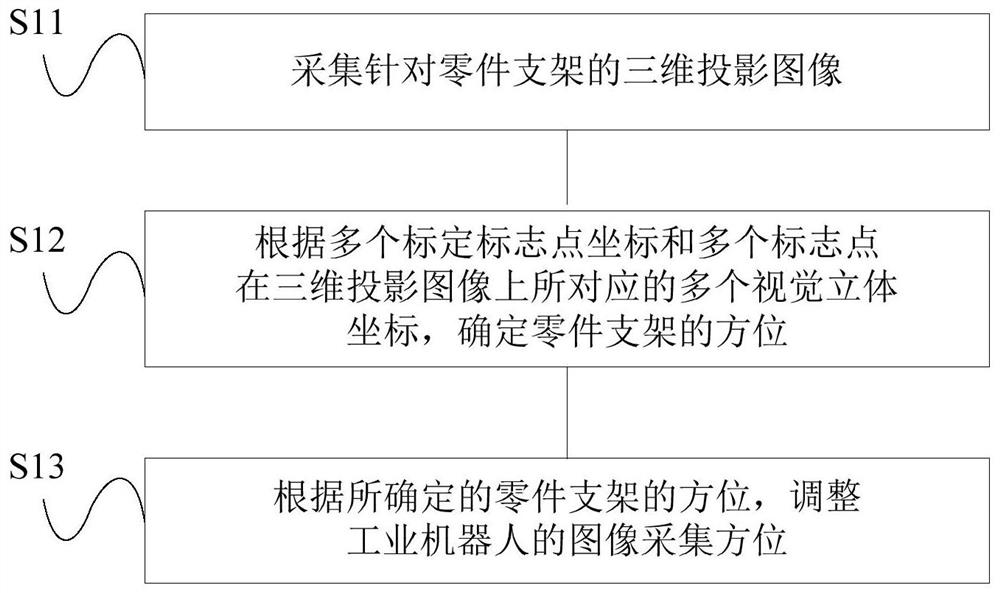
[0047] Such as figure 1 As shown, the automatic detection method for parts based on industrial robots according to an embodiment of the present invention includes:
[0048] S11. Acquire a three-dimensional projection image for the part bracket, wherein the part bracket is marked with a plurality of preset marker points corresponding to the coordinates of a plurality of calibration marker points in the robot tool coordinate system, and the part bracke...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More