

An Optimal Method for Track Planning Algorithm
A track planning and optimization method technology, applied in the field of unmanned ship navigation control, can solve the problems of increasing algorithm execution time, reducing execution efficiency, redundant invalid nodes, etc., to speed up pathfinding, improve execution efficiency, The effect of guaranteeing superiority
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
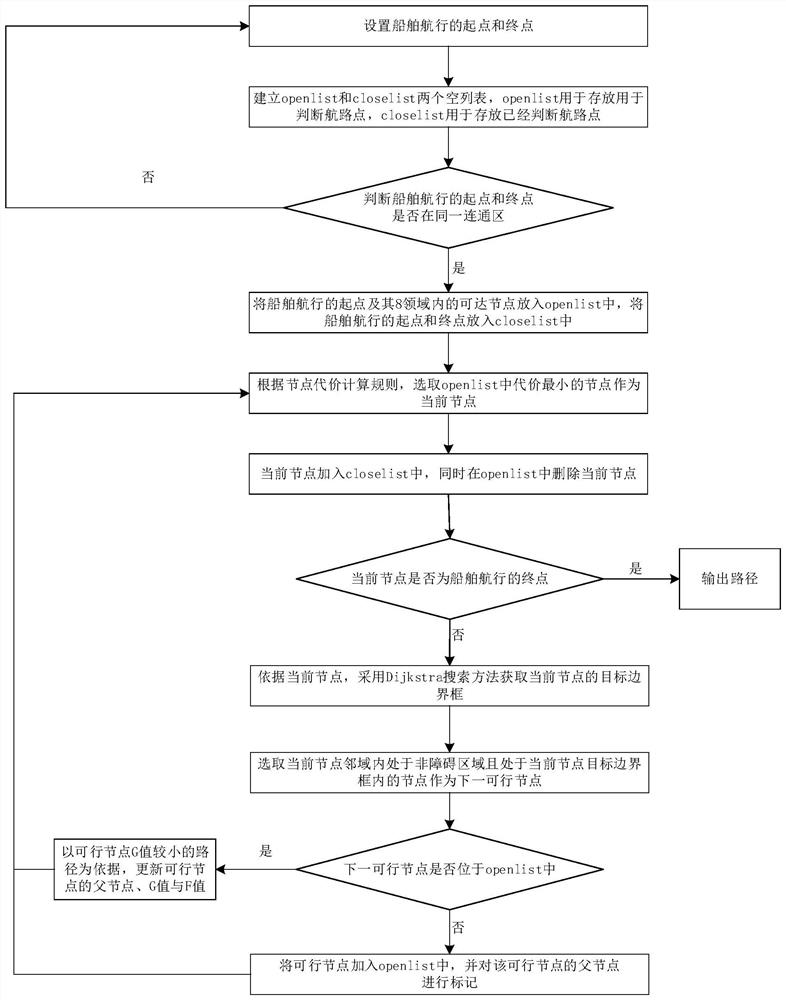
[0050] Below, based on the grid map and the A-star algorithm, the optimization method of the track planning algorithm provided by the present invention is described in detail, as figure 1 shown.
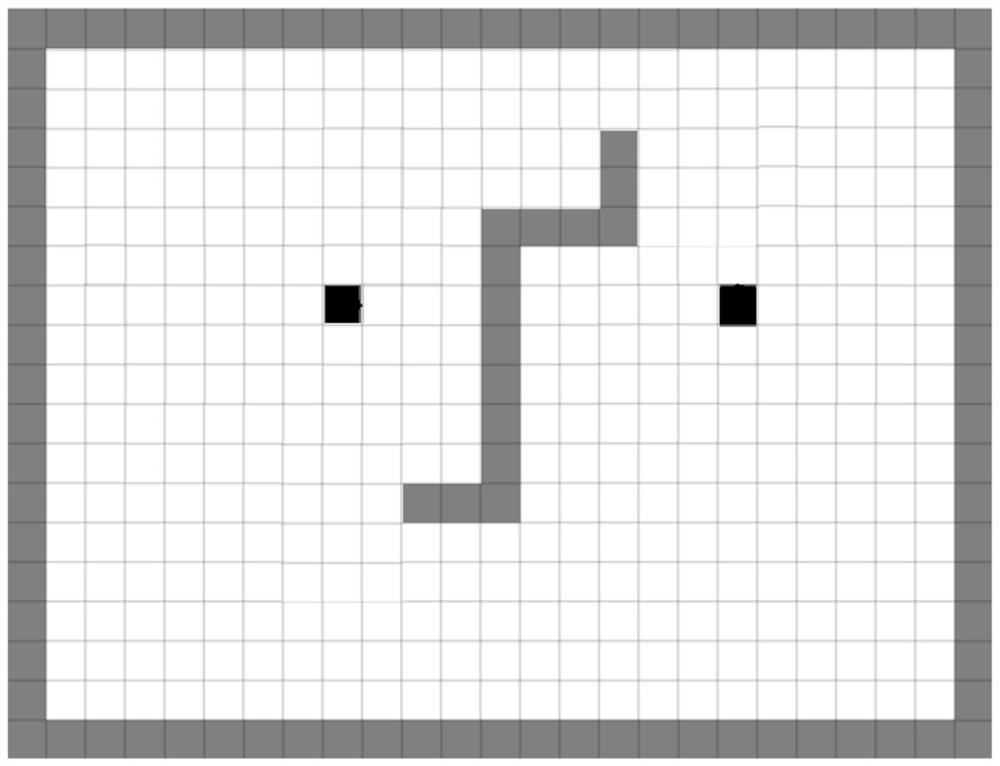
[0051] Step S1. According to the obstacle environment information, the grid map is divided into feasible areas and unfeasible areas; in the grid map, the starting point and the end point of the ship's navigation are set according to the current position of the ship and the navigation task.
[0052] Step S2. Two empty lists, openlist and closelist, are established, wherein the openlist is used to store the waypoints used for judging, and the closelist is used to store the waypoints already judged.
[0053] Step S3. Determine whether the start point and end point of the ship's voyage are in the same connected area, if yes, execute step S4; if not, return to step S1, and reset the start point and end point of the ship's voyage.
[0054] According to the breadth-first search algorithm, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More