

Self-adaptive integral sliding mode control method and system for laser radar scanning mechanism
A technology of scanning mechanism and laser radar, which is applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve the problems of long measurement optical distance, small monitoring area, and difficult self-positioning of observation targets
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] In order to further illustrate the features of the present invention, please refer to the following detailed description and accompanying drawings of the present invention. The accompanying drawings are for reference and description only, and are not intended to limit the protection scope of the present invention.
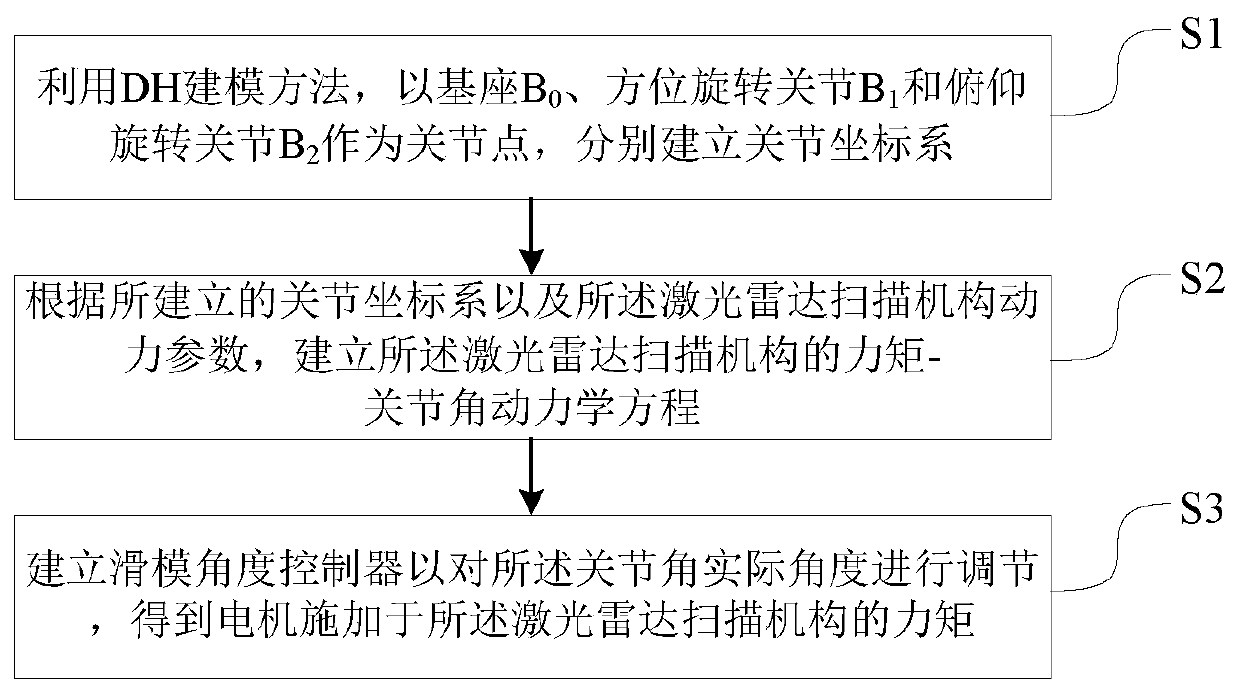
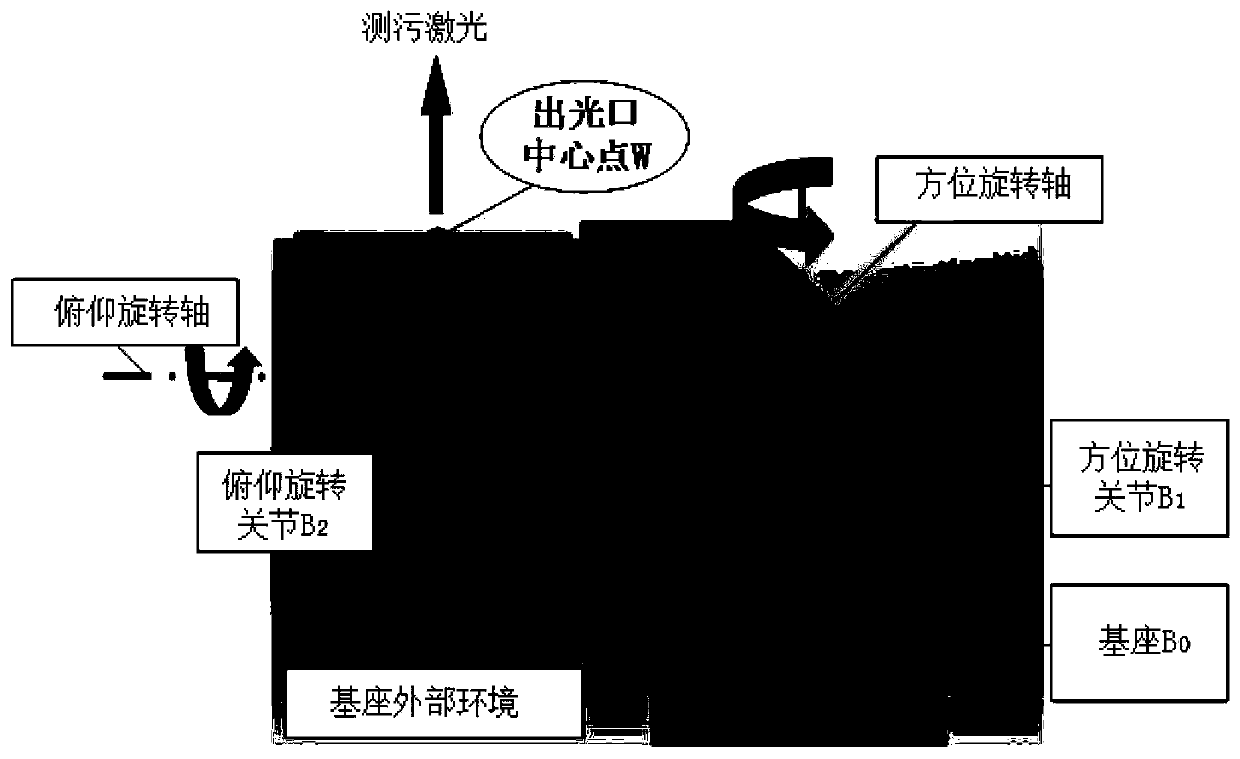
[0054] Such as figure 1 As shown, this embodiment discloses an adaptive integral sliding mode control method of a lidar scanning mechanism, and the lidar scanning mechanism includes a base B 0 , Azimuth rotation joint B 1 and pitch-rotation joint B 2 , Base B 0 , Azimuth rotation joint B 1 and pitch-rotation joint B 2 To rotate and connect in turn, the control method includes the following steps S1 to S3:
[0055] S1. Using the DH modeling method, base B 0 , Azimuth rotation joint B 1 and pitch-rotation joint B 2 As joint points, establish the joint coordinate system respectively;
[0056] S2. Establish a torque-joint angle dynamic equation of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More