Metal wall surface self-adaptive climbing robot
An adaptive and robotic technology, applied in the field of robotics, can solve the problems of being unable to meet the requirements of metal wall climbing, and achieve the effect of simple and reliable transmission mechanism, simplified mechanical structure, and improved safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The embodiments of the present invention are described in detail below. This embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following implementation example.
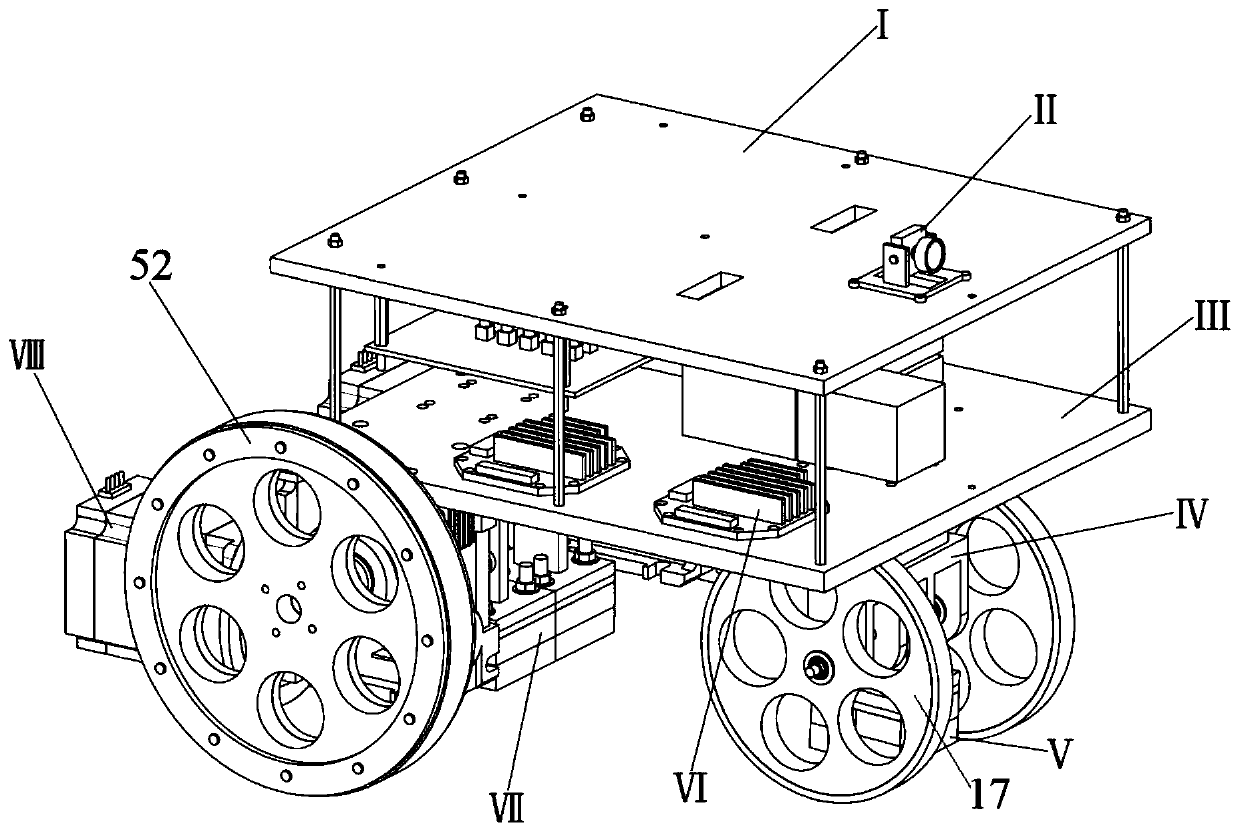
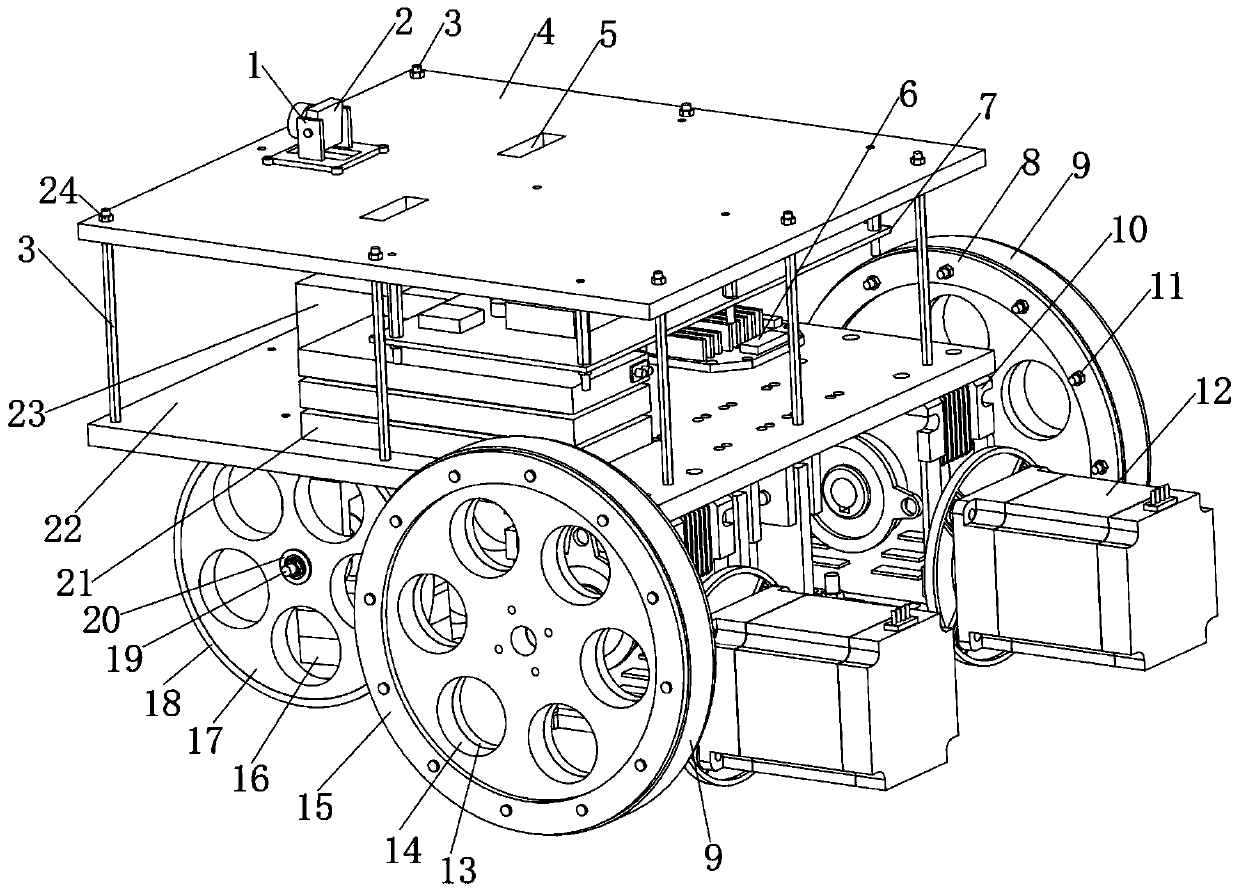
[0051] Such as figure 1 and figure 2 As shown, the robot of the present invention includes: upper cover support plate I, image transmission module II, robot body III, front wheels 17, front wheel steering module IV, front wheel magnetic adsorption module V, drive module VI, rear wheel magnetic adsorption Module VII, power module VIII and rear wheel 52.
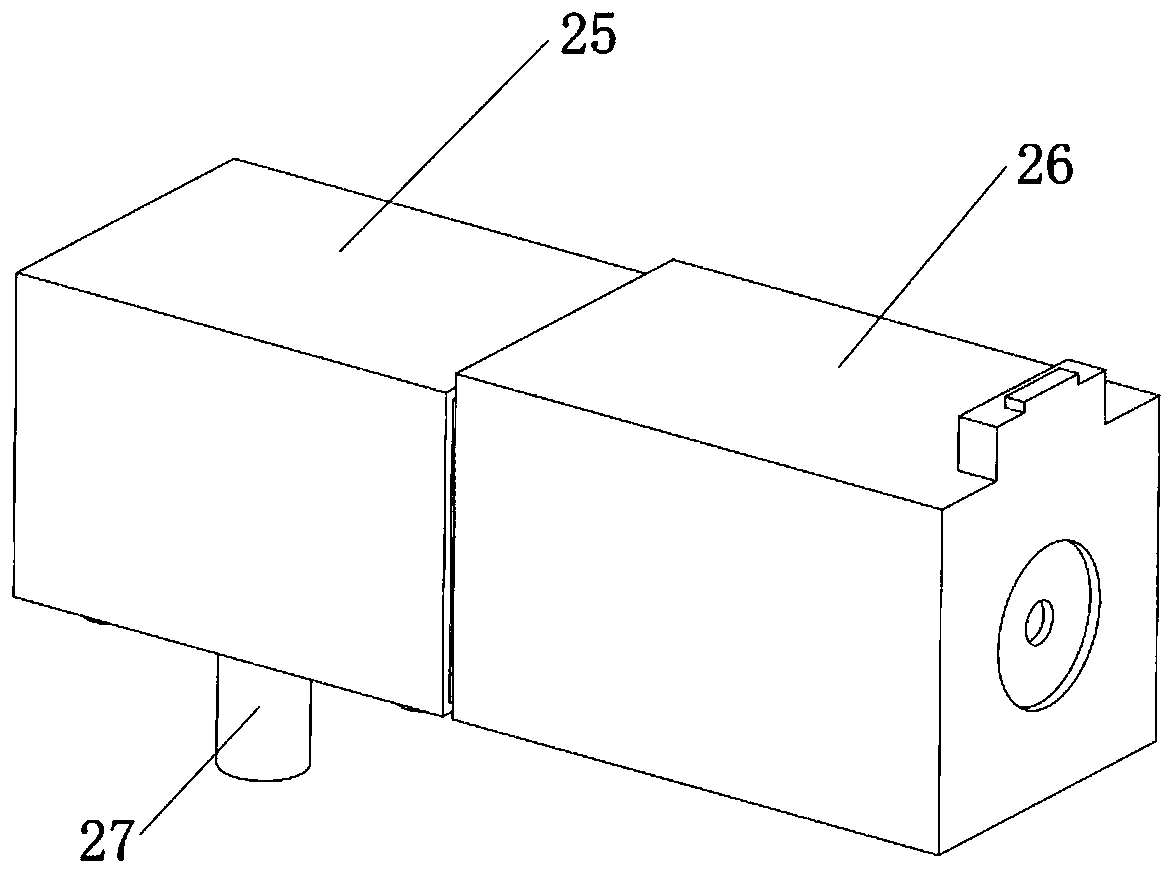
[0052] Such as image 3 As shown, the steering motor of the present invention is composed of a stepper motor 26 and its supporting worm gear reducer 25. The worm gear reducer 25 is an A4632 type worm gear reducer, and the stepper motor 26 is a 32-type stepper m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com