

Hydraulic direct-drive three-freedom spherical wrist
A degree of freedom and spherical technology, applied in the field of robotics, can solve the problems of poor dynamic response characteristics of joints, high manufacturing/maintenance costs, low load/weight ratio, etc., to achieve easy wrist posture control, simple kinematics characteristics, load/ The effect of high self-weight ratio
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
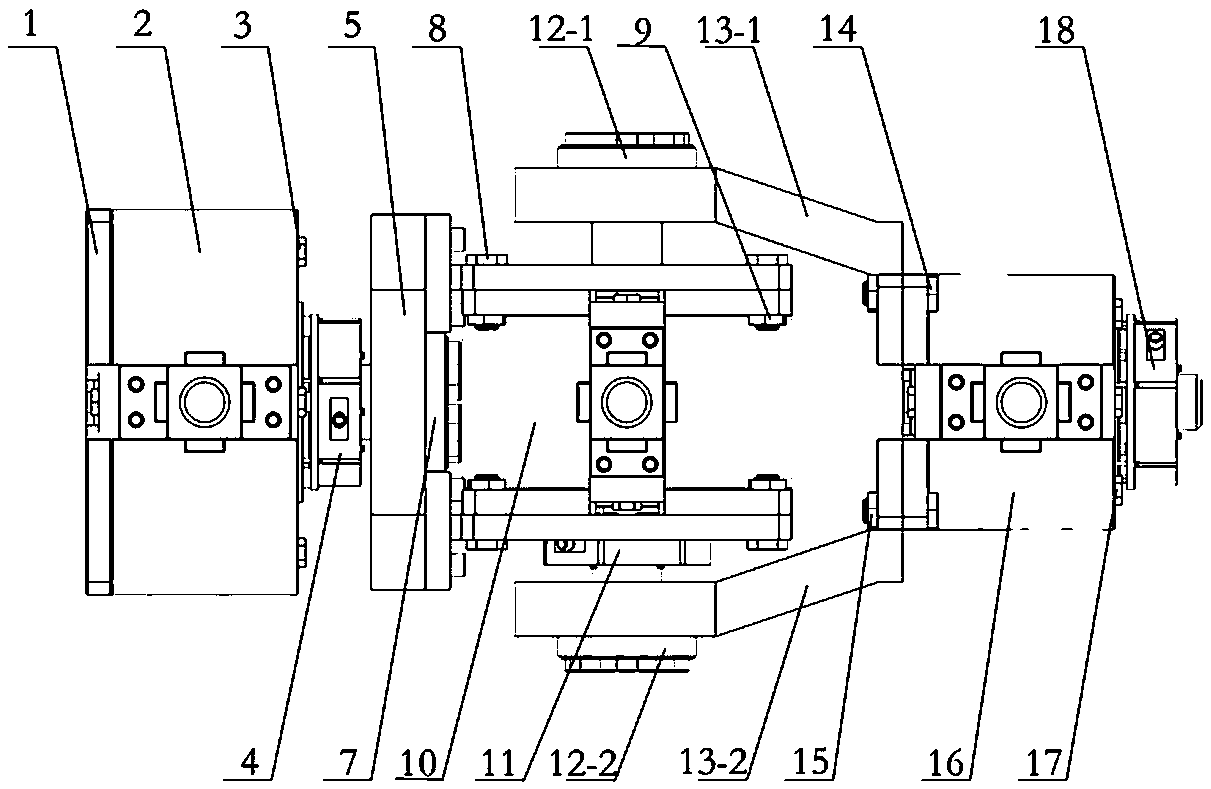
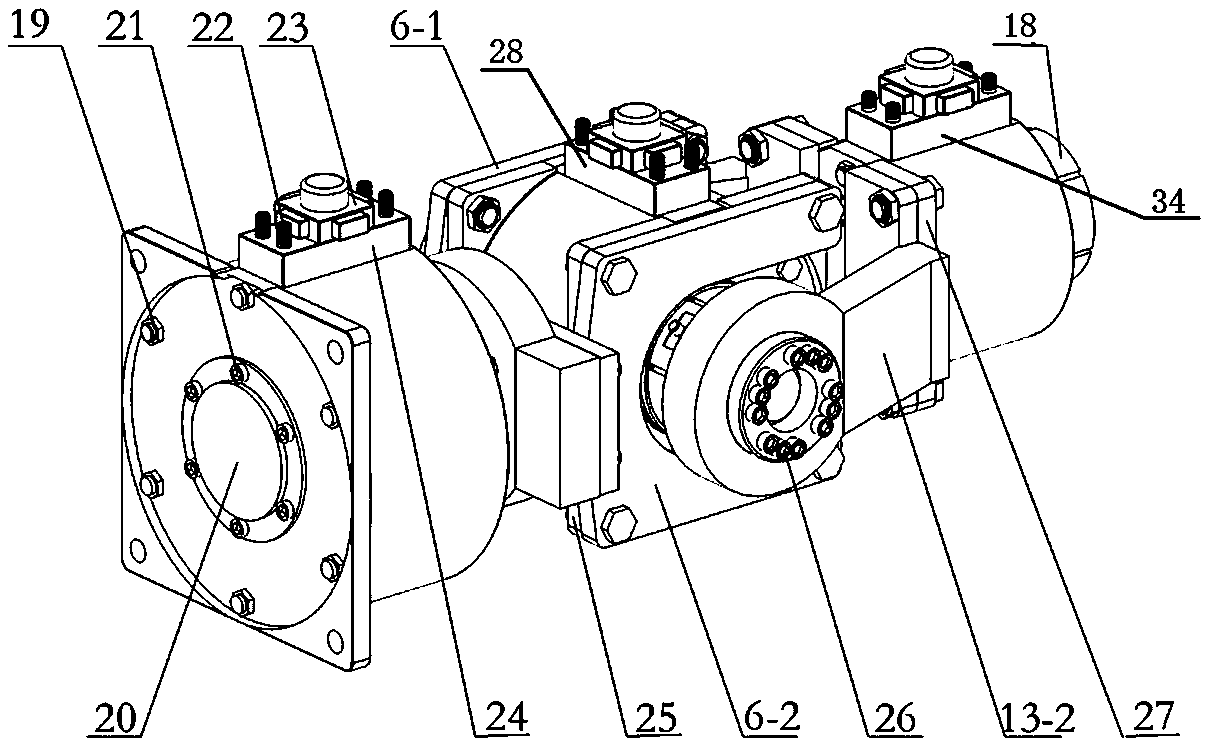
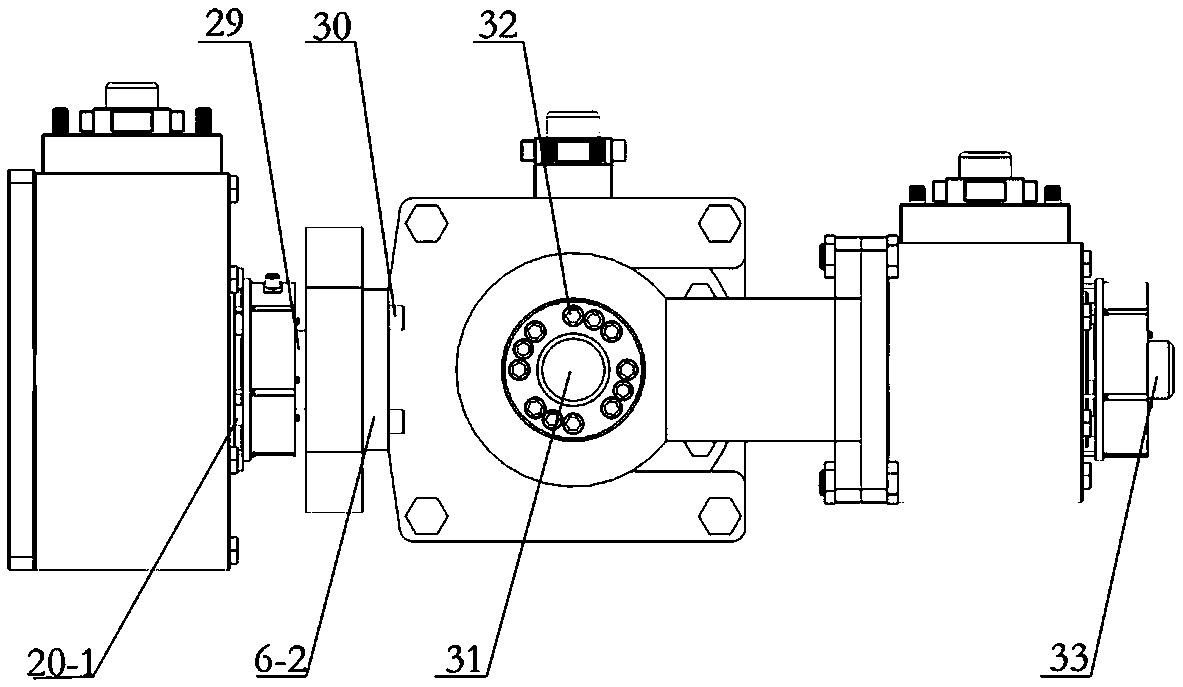
[0023] combine Figure 1-Figure 6 To describe the embodiment of the present invention in detail, the hydraulic direct-drive three-degree-of-freedom spherical wrist of this embodiment includes the first-stage hydraulic swing cylinder 2, the first-stage hydraulic swing cylinder shaft 29, and the first-stage hydraulic swing cylinder shaft 29. The first-stage angle sensor 4, the flange plate 1 of the first-stage hydraulic swing cylinder can be fixedly connected with the flange plate of the mechanical arm through bolts, and the long bolts 3 and long bolts and nuts 19 are fixedly connected to different parts of the shell of the first-stage hydraulic swing cylinder In one piece, the bearing rear end cover 20 is fixed on the motor casing by the end cover fixing screw 21 and has good sealing performance, the bearing front end cover 20-1 is fixed on the motor casing and has good sealing performance, the first stage hydraulic pressure The swing cylinder rotating shaft 29 is fixedly conne...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More