

Full-hydraulic-drive five-degree-of-freedom transfer robot
A technology for handling robots and degrees of freedom. It is applied in the direction of manipulators, program-controlled manipulators, and manufacturing tools. It can solve the problems of handling robots such as heavy weight, low space utilization, and difficult processing, and achieve high load/weight ratio and space utilization. The effect of high efficiency and low processing cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
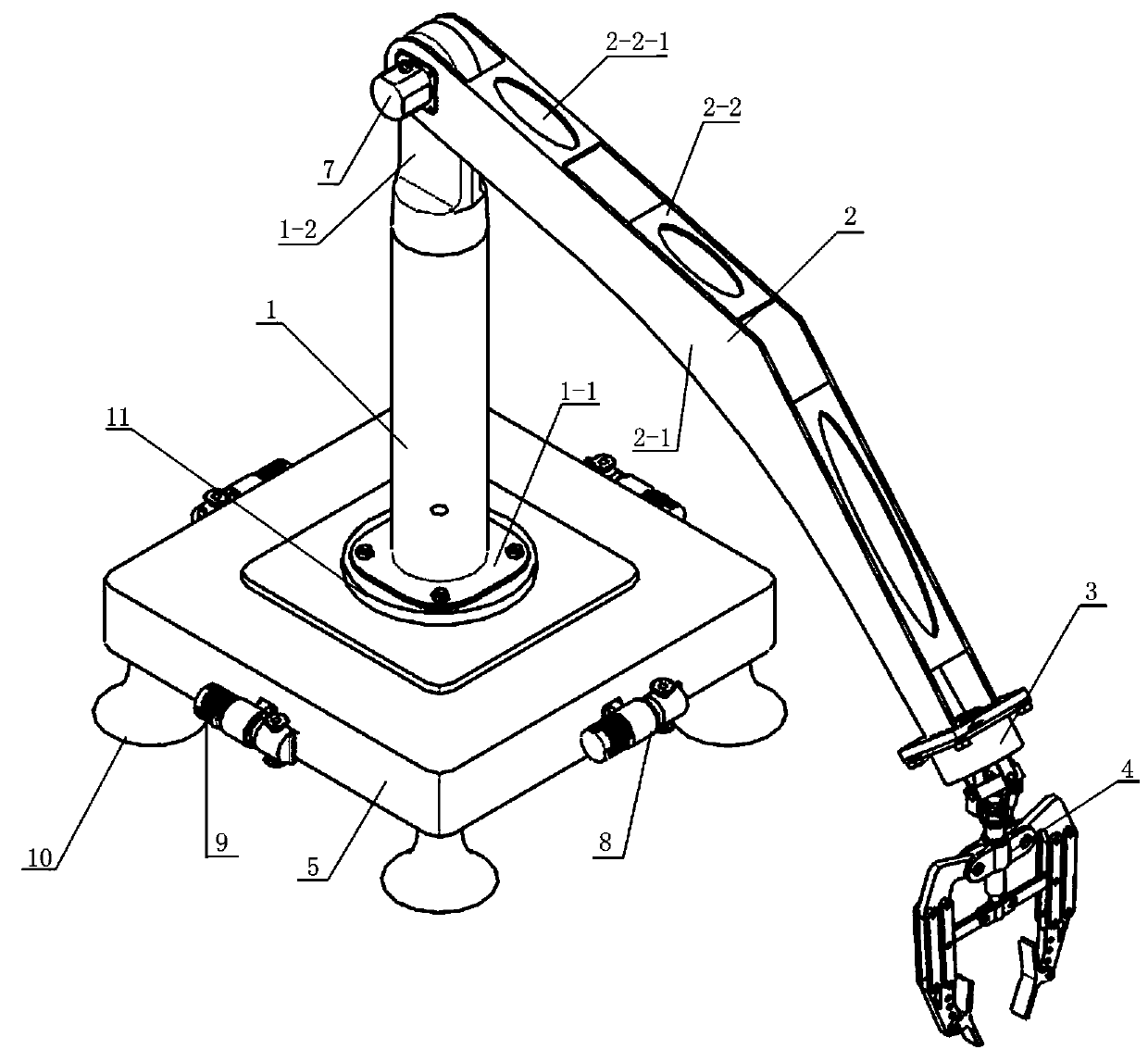
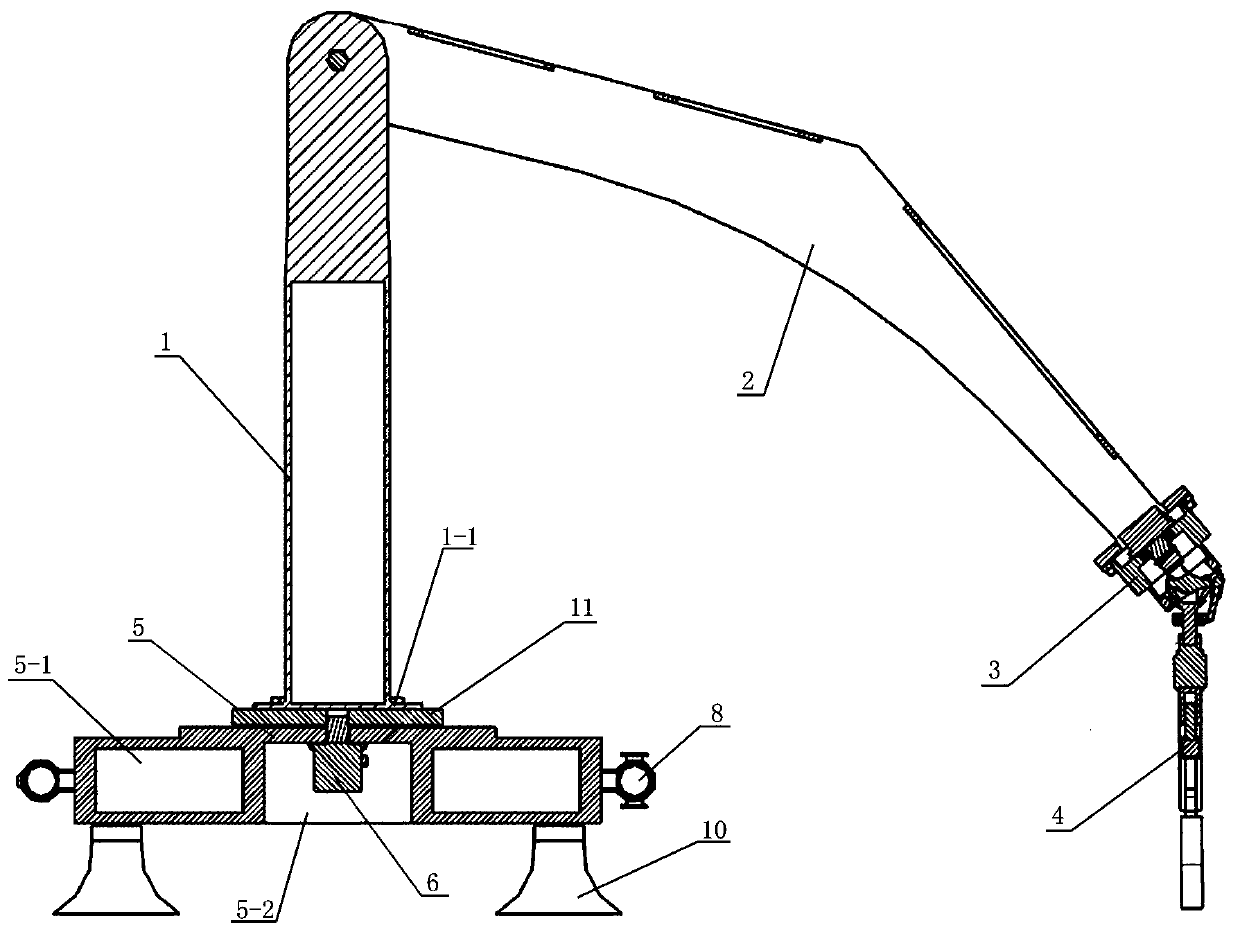
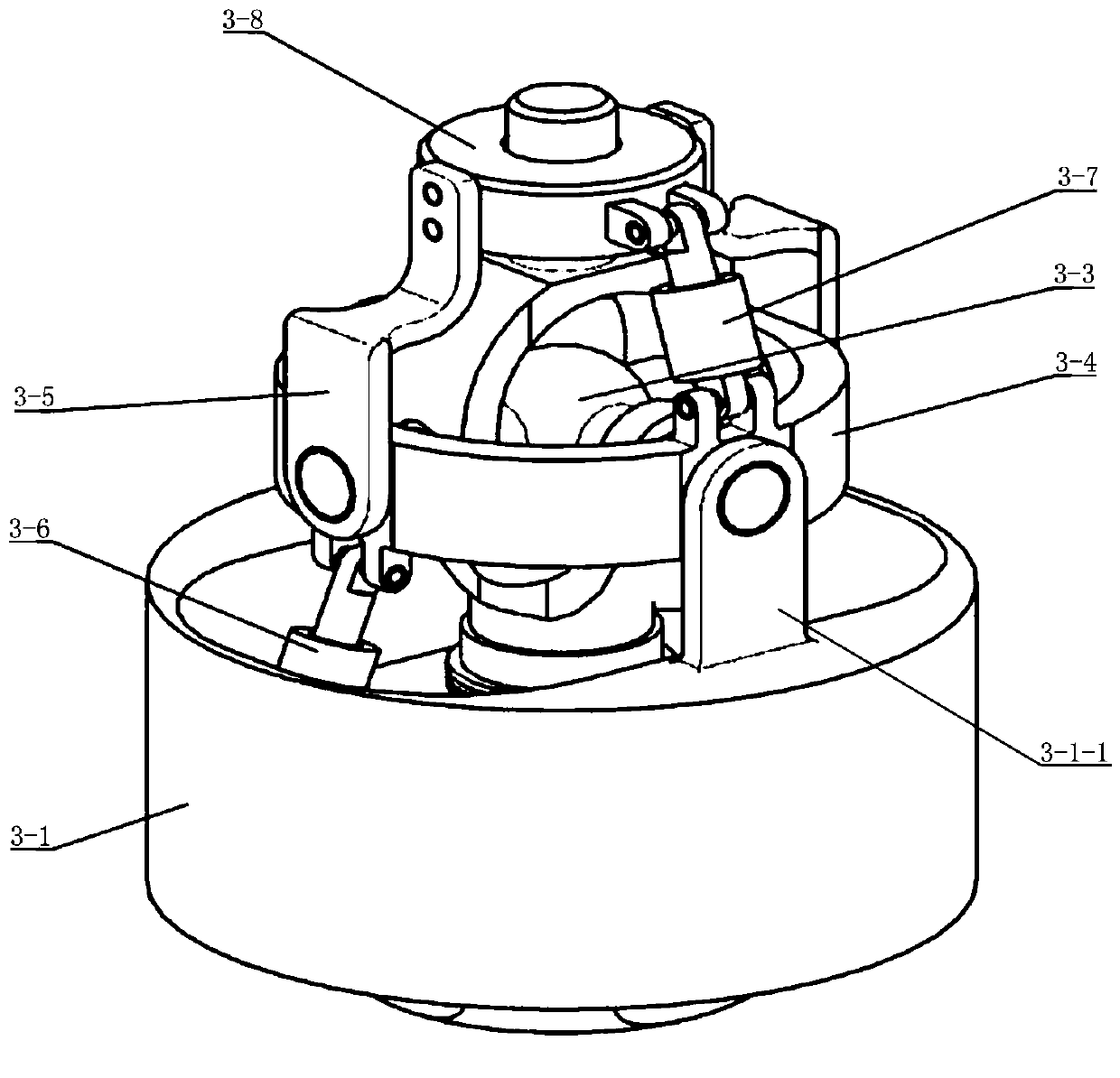
[0024] refer to Figure 1 to Figure 9 , a fully hydraulically driven five-degree-of-freedom handling robot of the present invention includes a large arm 1, a small arm 2, a wrist 3, and an end effector 4; it also includes a base 5 and a first hydraulic motor 6, and the base 5 is equipped with There is an oil chamber 5-1 for oil storage, the casing of the first hydraulic motor 6 is fixed on the base 5, and the rotating shaft of the first hydraulic motor 6 passes through the base 5 vertically upwards and connects with the bottom end of the boom 1 Fixed connection; also includes a second hydraulic motor 7, the housing of the second hydraulic motor 7 is fixed at one end of the small arm 2, the rotating shaft of the second hydraulic motor 7 is arranged horizontally and is fixedly connected with the top end of the boom 1; The wrist 3 includes a cylinder 3-1, a third hydraulic motor 3-2, a ball fork universal joint 3-3, a pitching ring 3-4, two connecting ribs 3-5, and a pitching hyd...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More