

Robot wrist unit driven by hydraulic actuator
A hydraulic actuation and robot technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of end-effector flexibility and attitude adjustment ability limitations, spherical gears are difficult to manufacture, difficult to manufacture and assemble, etc., to achieve increased It can achieve the effects of range, high load/self-weight ratio, and easy control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
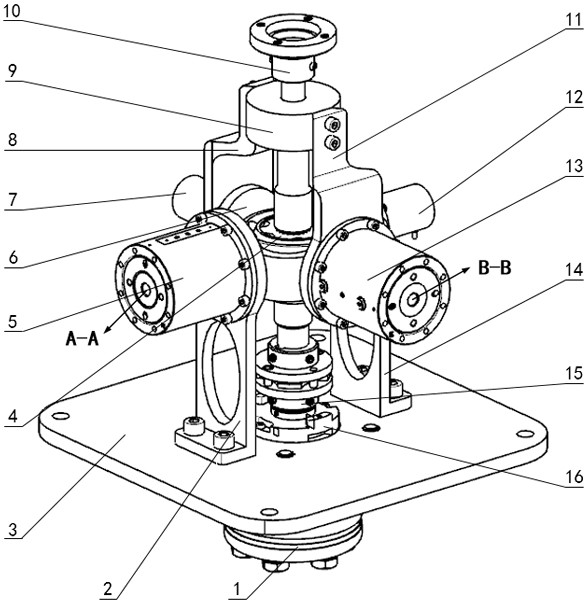
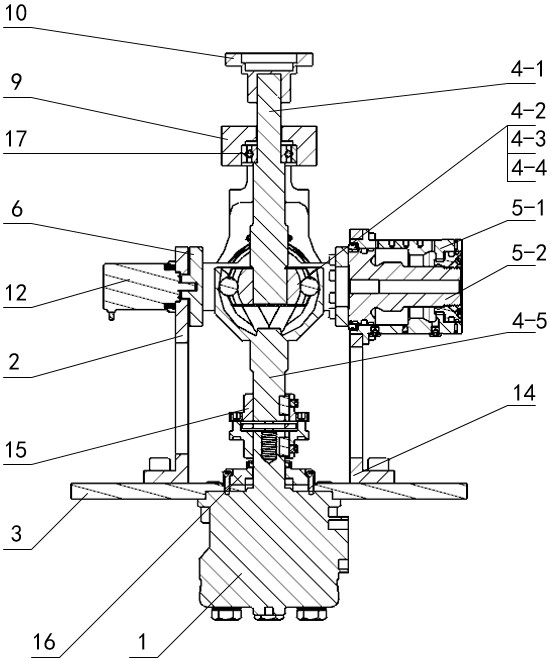
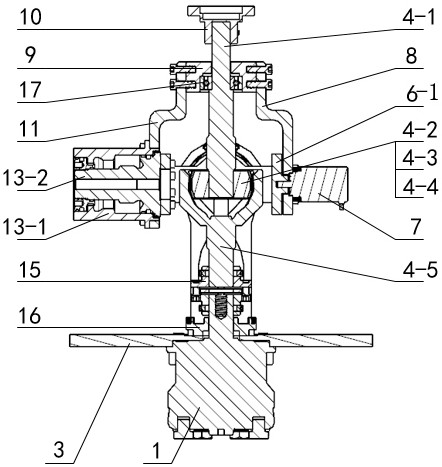
[0029] Attached below figure 1 ~ attached image 3 Embodiments of the present invention will be further described. A robot wrist unit driven by a hydraulic actuator, including a machine base 3 and a ball cage type constant velocity universal joint 4, the ball cage type constant velocity universal joint 4 includes a first transmission shaft 4-5, a second transmission shaft 4 -1, a hydraulic motor 1 is arranged at the center of the bottom of the machine base 3, the output shaft of the hydraulic motor 1 vertically penetrates the machine base 3 and is connected with the rotation angle encoder 16 and the first transmission shaft 4-5, the housing of the rotation angle encoder 16 Fixed with the machine base 3, the machine base 3 is symmetrically fixed with a vertically arranged first connecting plate 2 and a second connecting plate 14 at both ends of the rotation angle encoder 16, and the upper part of the first connecting plate 2 is fixed with a pitching hydraulic swing The cylind...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More