

Novel light six-freedom-degree cooperative mechanical arm
A technology of degrees of freedom and manipulators, applied in the field of manipulators, can solve problems such as unstable quality and reliability, many manipulator product specifications, poor manipulator flexibility, etc., achieve high load/weight ratio, improve rigid support force, easy-to-use effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
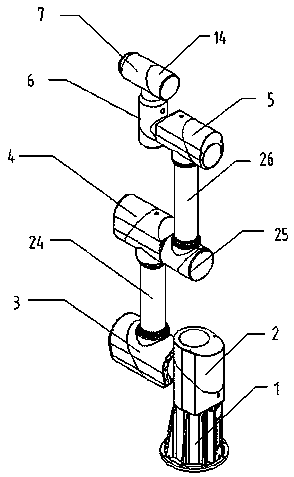
[0052] As shown in the figure, a new type of lightweight six-degree-of-freedom collaborative robot arm includes a base 1, a first joint 2, a second joint 3, a third joint 4, a fourth joint 5, a fifth joint 6 and a sixth joint 7;
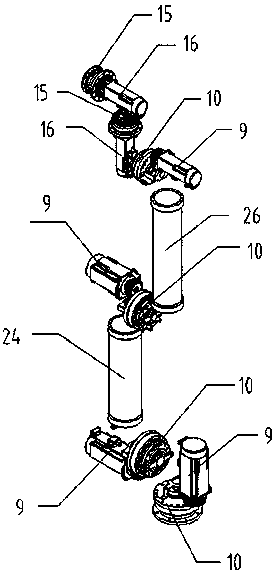
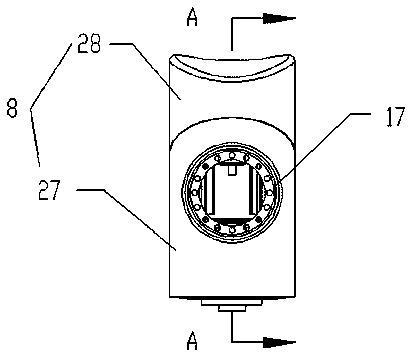
[0053] The first joint, the second joint, the third joint, and the fourth joint all include a first housing 8, a first motor 9 and a first speed reducer 10, the first speed reducer is fixed in the first housing, and the first speed reducer The output end of the first motor is set outside through the first housing, and the first motor is also fixed in the first housing. The output shaft of the first motor is provided with a first synchronous pulley 11, and the input end of the first reducer is provided with The second synchronous pulley 12, the first synchronous pulley and the second synchronous pulley are connected by a synchronous belt 13, and the first motor controls the output end of the first reducer to rotate;
[0054] Both the fifth joint and t...
Embodiment 2
[0072] A new type of light-duty six-degree-of-freedom collaborative manipulator described in Embodiment 1 is different in that a suction cup assembly 49 can be optionally installed on the sixth joint, and the suction cup assembly includes a mounting plate 50, which is detachably fixed on the On the mechanical arm, a plurality of suction cup structures 51 are arranged on the mounting plate, and the suction cup structures are detachably installed on the mounting plate.
[0073] Further, the number of suction cup structures is four, and the four suction cup structures are arranged on the mounting plate in a 2*2 form.
[0074] Further, the mounting plate is a rectangular plate, and the mounting plate is provided with two first through holes 52 of circular structure, and two second through holes 53 of circular structure are arranged between the first through holes, and the first through holes The aperture is larger than the aperture of the second through hole, the two first through...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More