

Unmanned ship path tracking control method based on finite time guidance and control
A finite time, path tracking technology, applied in non-electric variable control, control/regulation system, two-dimensional position/channel control, etc., can solve the problem of unmanned ship precise control, unrealized disturbance and uncertain items Estimation and compensation, system response speed is not fast enough, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
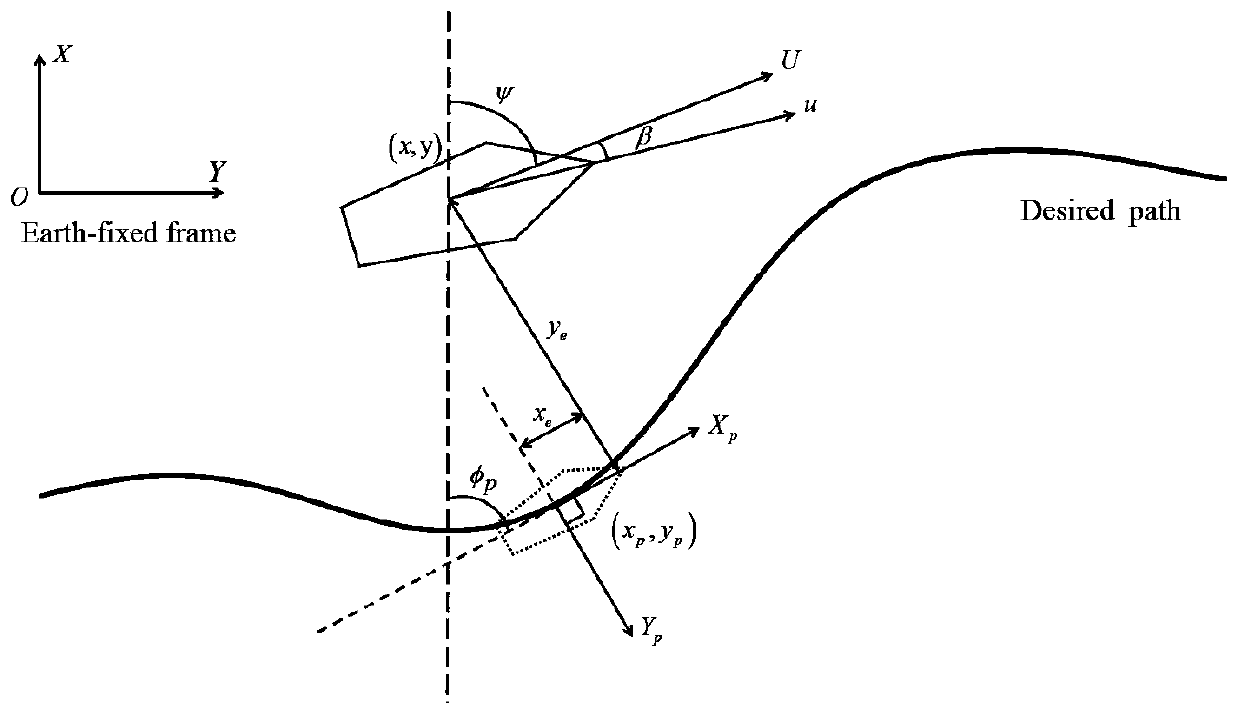
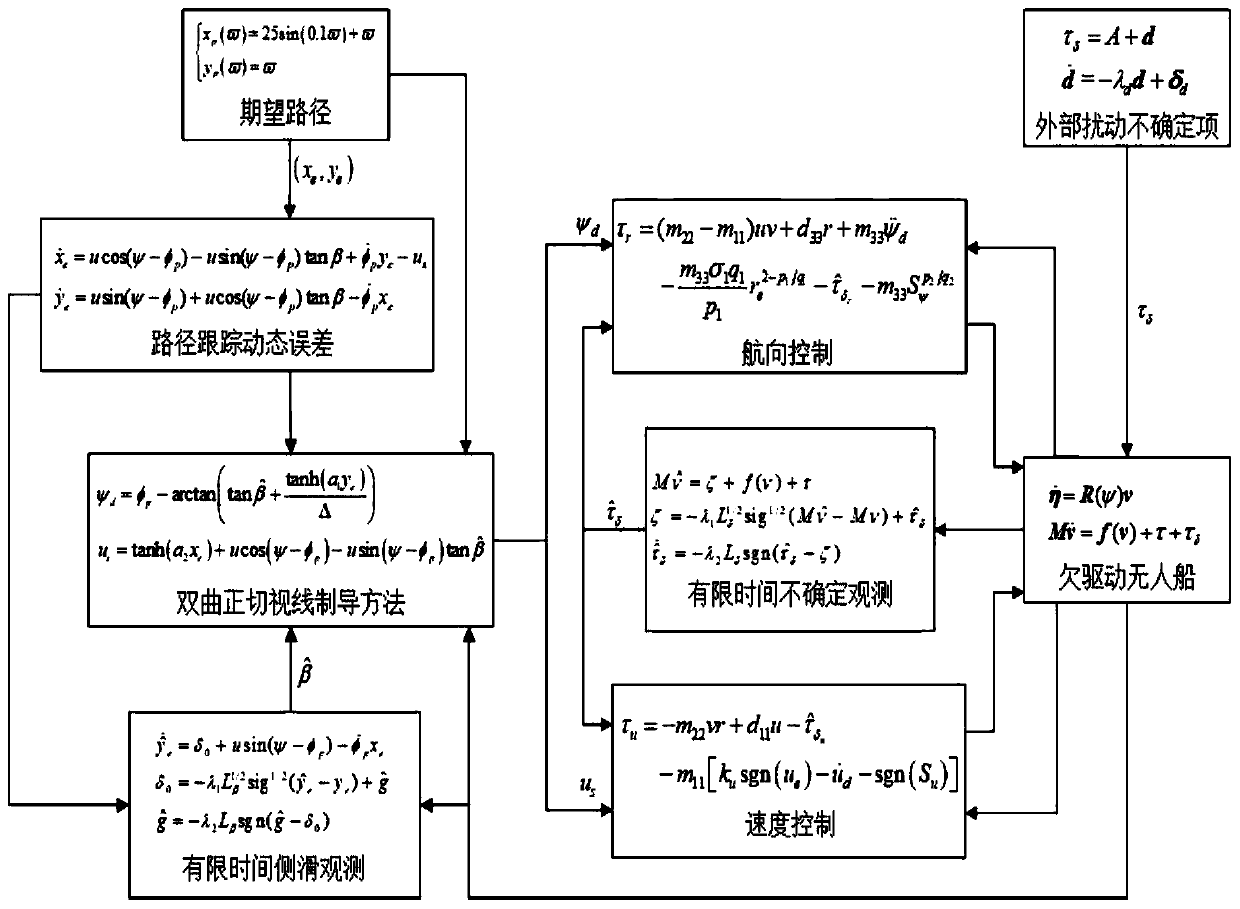
[0120] The present invention will be further described below in conjunction with the accompanying drawings. Such as figure 1 As shown, in order to facilitate understanding and calculation, combined with the actual working environment of the unmanned ship, two coordinate systems are established in the two-dimensional plane space, where the Earth-fixed frame represents the inertial coordinate system, and the coordinate system with the unmanned ship itself as a reference is called It is the attached body coordinate system, and through the coordinate transformation between the two coordinate systems, the path tracking error and angle change required by the design method proposed by the present invention can be obtained. On this basis, the design of the unmanned ship guidance and control method is carried out. Specific design principles such as figure 2 shown.
[0121] In order to illustrate the effectiveness of the proposed method of the present invention, according to image ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More