Electrified operation robot remote operator training system and method based on point cloud
A technology for live work and personnel training. It is used in manipulators, program-controlled manipulators, and manufacturing tools. It can solve problems such as mechanical arm damage and poor vision, and achieve the effects of increasing speed, improving effectiveness, and reducing quantity.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
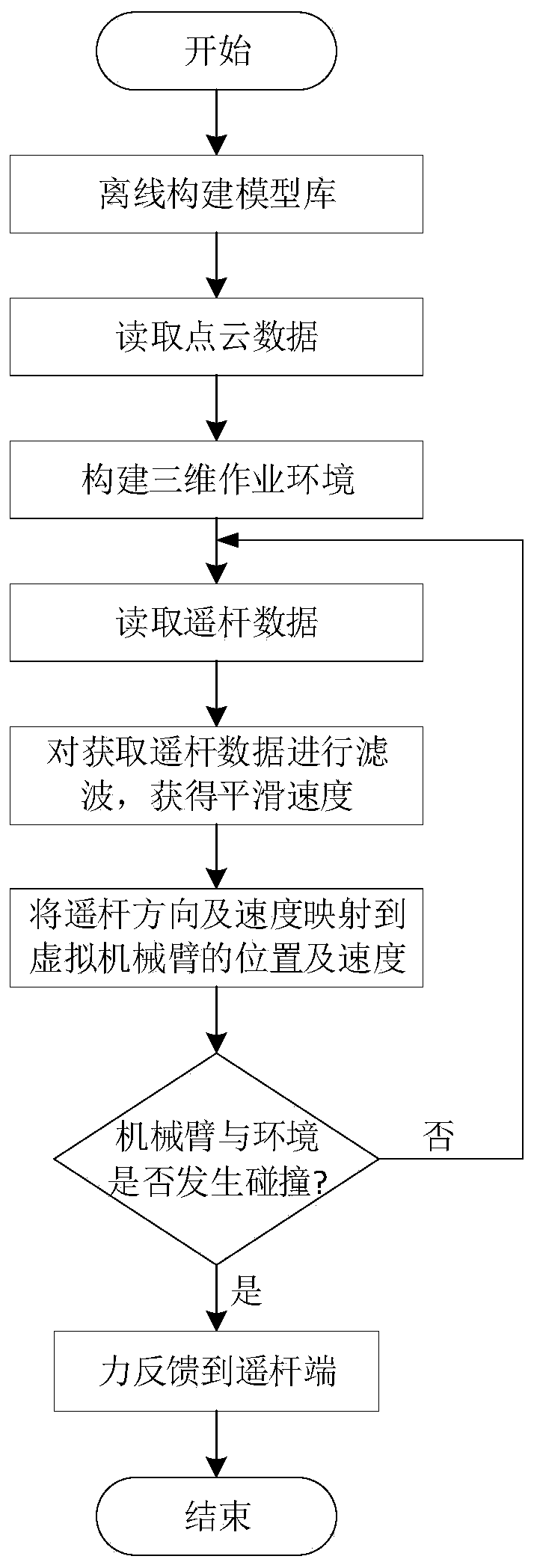
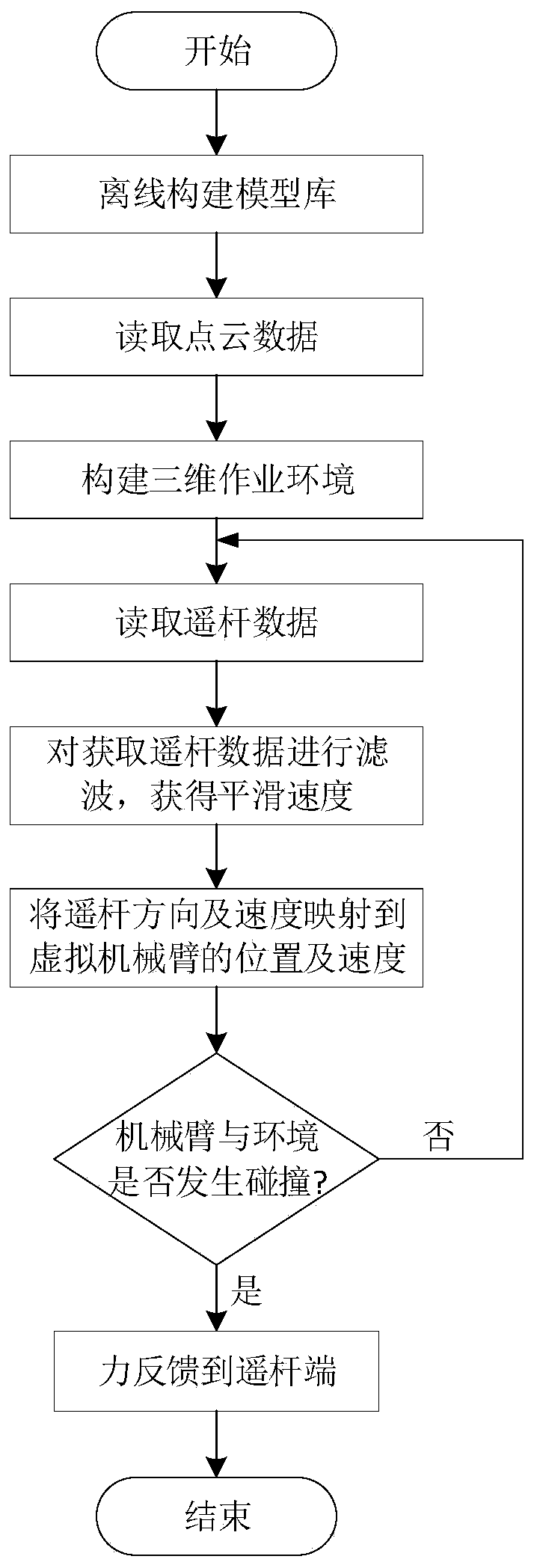
[0015] The point cloud-based remote operator training system for a live working robot of the present invention includes a depth camera, an industrial computer, and a main manipulator remote control lever with a force feedback function connected thereto, and an auxiliary mechanical arm remote control lever with a force feedback function such as figure 1 As shown, it is the Geomagic Touch six-dimensional tactile input and output device, which can provide the operator with a sense of force presence.
[0016] The depth camera is used to collect point cloud information of the actual working environment, and the industrial computer is used to establish a virtual working environment based on the point cloud information, including the virtual main manipulator, virtual auxiliary manipulator and other objects in the virtual environment, with force feedback The functional main manipulator remote control lever is used to control the movement of the virtual main manipulator, and the auxilia...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More