

Antenna servo system calibration method based on coordinate rotation
A technology of servo system and coordinate rotation, applied in the field of antenna servo system calibration based on coordinate rotation, can solve the problem of high cost, achieve low cost, save hardware and manpower, and reduce design and use costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0038] Taking the A-E (azimuth-elevation) two-axis pedestal antenna as an example, the calibration method of the antenna includes the following steps:
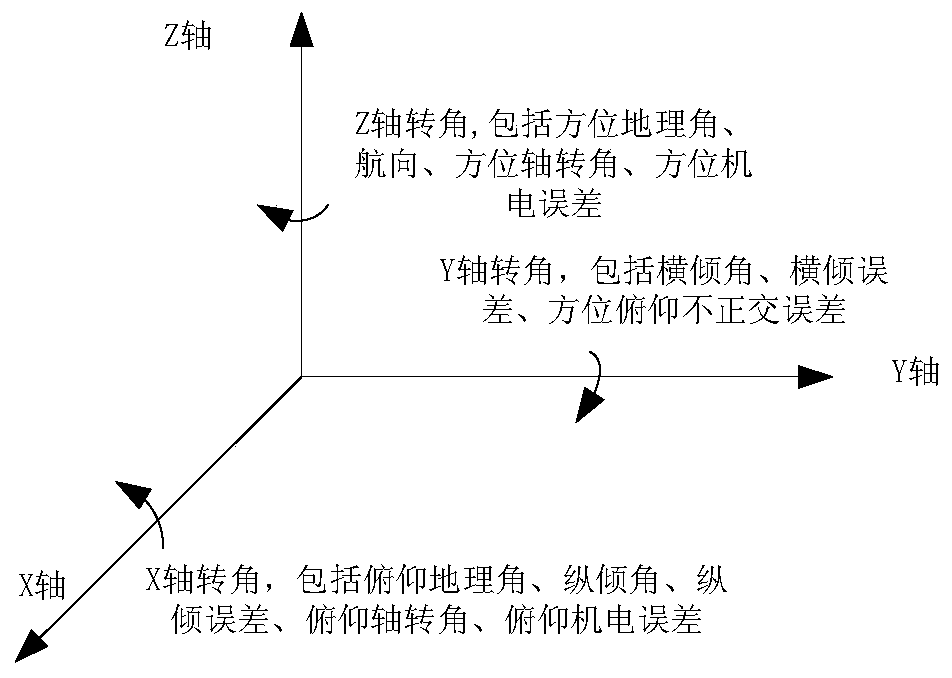
[0039] (1) A-E (azimuth-pitch) two-axis pedestal antenna system error analysis
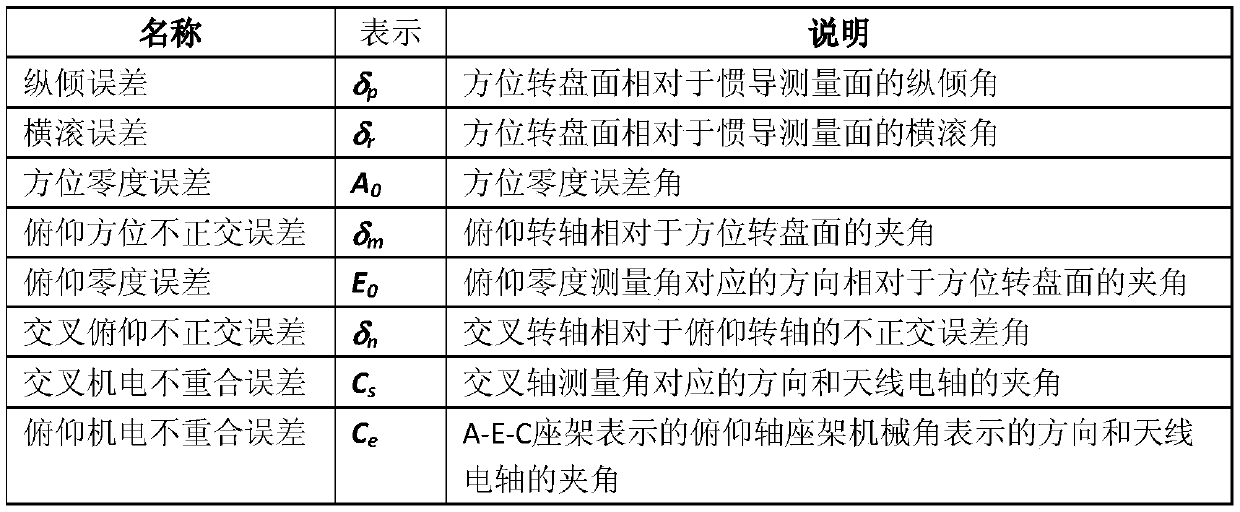
[0040] Analyze the systematic errors of the A-E (azimuth-pitch) two-axis pedestal antenna, mainly including the pitch error, roll error of the antenna azimuth turntable, the mechanical zero degree of the azimuth axis, the non-orthogonal error of the azimuth axis and the pitch axis, and the pitch mechanical error. The misalignment error between the axis and the electric axis of the antenna, the misalignment error between the azimuth mechanical axis and the electric axis of the antenna, the error expression is shown in the table below;
[0041]
[0042] (2) Determine the rotation matrix of the shaft angle and system error according to the shaft relationship
[0043] A-E (azimuth-pitch) two-axis pedestal antenna axis coordinate relationship diagr...
Embodiment 2
[0068] Taking the A-E-C (azimuth-elevation-cross) three-axis pedestal antenna as an example, the calibration method of the antenna includes the following steps:
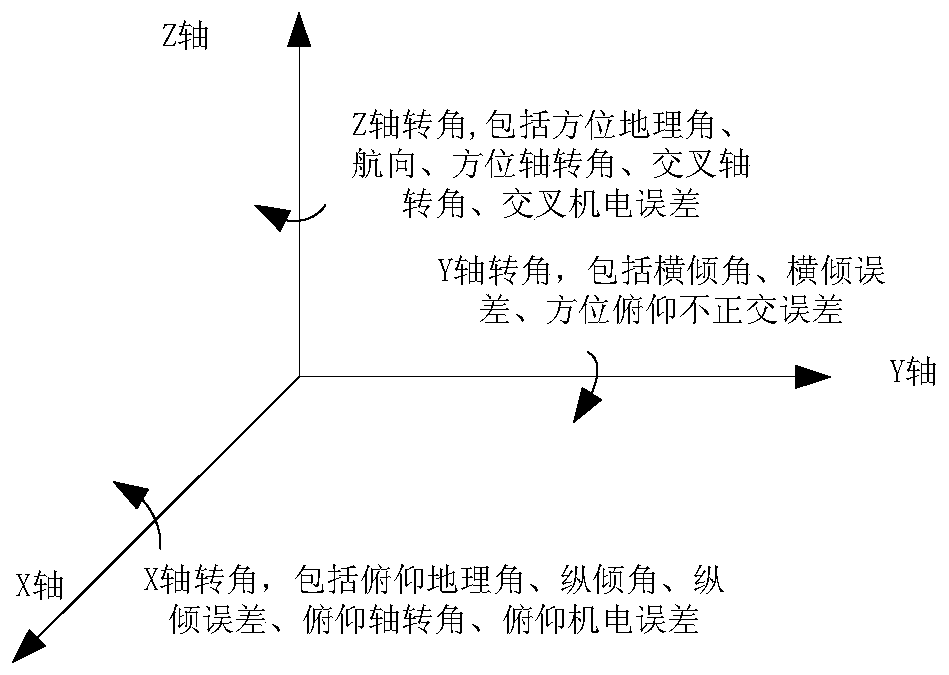
[0069] (1) System Error Analysis of A-E-C (Azimuth-Elevation-Cross) Triaxial Mount Antenna
[0070] Analyze the systematic errors of the A-E-C (azimuth-pitch-cross) three-axis mount antenna, mainly including the pitch error and roll error of the antenna azimuth turntable, the mechanical zero degree of the azimuth axis, the non-orthogonal error of the azimuth axis and the pitch axis, The mechanical zero of the pitch axis, the non-orthogonal error between the pitch axis and the cross axis, the non-coincidence error between the cross mechanical axis and the antenna electrical axis, and the non-coincidence error between the pitch mechanical axis and the antenna electrical axis, the error expression is shown in the following table:
[0071]
[0072] (2) Determine the rotation matrix of the shaft angle and system error ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More