SLAM rapid repositioning method based on local key frame matching and image processing device
A key frame and relocation technology, applied in image data processing, image enhancement, image analysis, etc., can solve the problems of large database and matching time increase, and achieve good experience, increase speed, and reduce stuttering effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
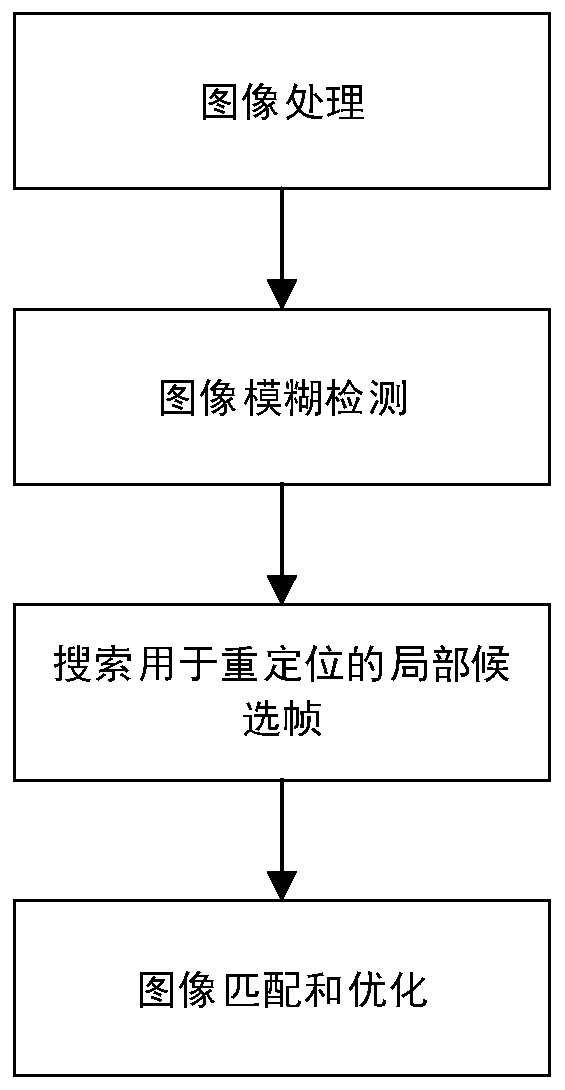
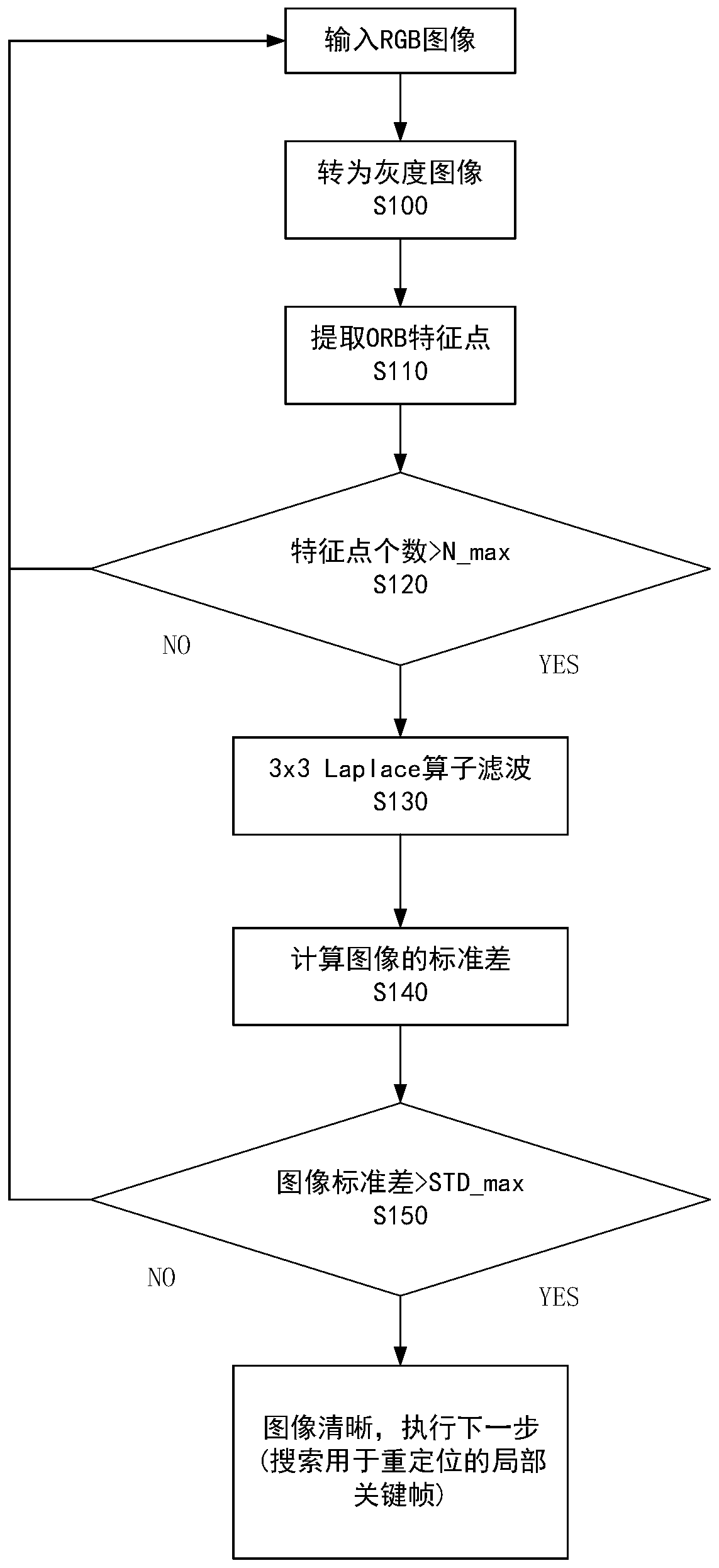
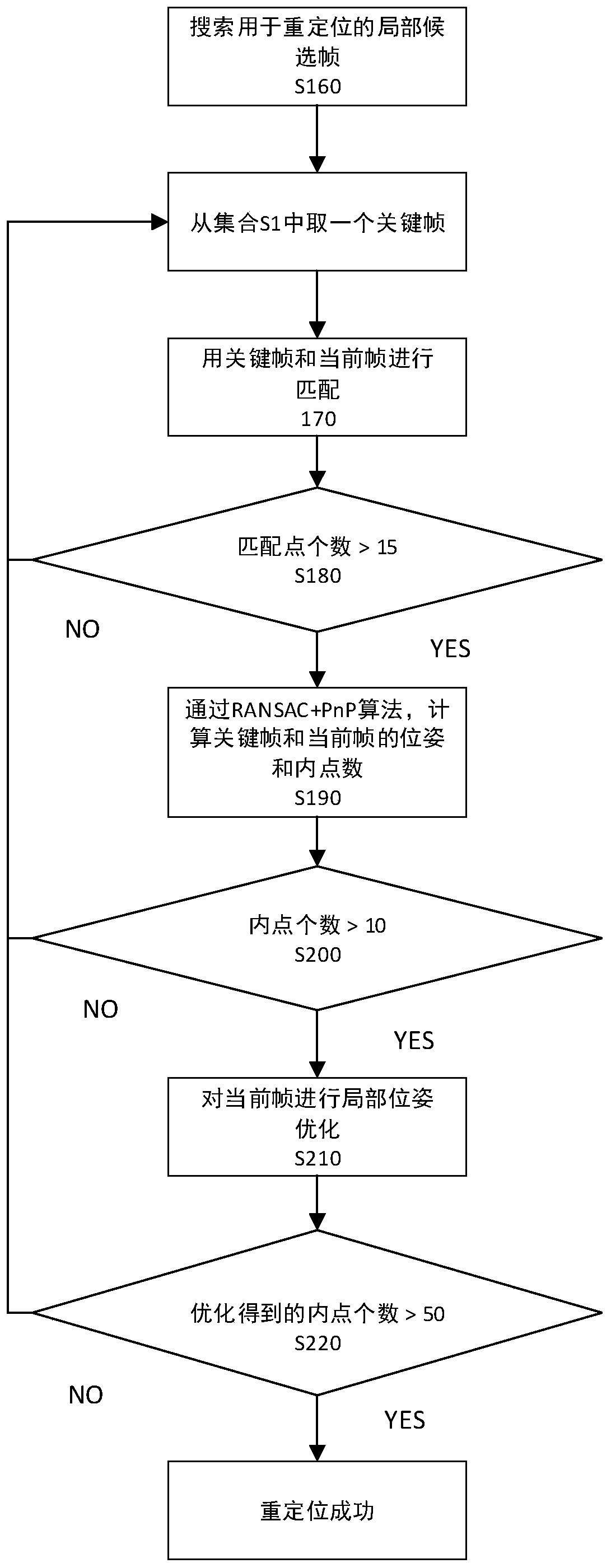
[0016] Based on the ORB-SLAM2 algorithm framework, the present invention proposes a SLAM fast relocation method based on local key frame matching. The algorithm includes: 1) Image processing: In the vision-based ORB SLAM2 algorithm framework, extract the ORB feature points of the image; 2) Image blur detection: perform blur detection on the image, and filter blurred pictures; 3) Search for relocation Local candidate frames of : Construct an image set, which is obtained by screening all the first n frames of images that observe the feature points of the reference key frame; 4) Image matching and optimization: use the current frame to match the images in the image set and For pose optimization, if the specified constraints are met, the relocation is considered successful. In the actual AR scene, this algorithm can improve the speed of relocation after tracking failure, reduce the stuttering phenomenon, and give users a better experience.
[0017] The specific implementation man...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More