

Target detection and tracking method based on unmanned aerial vehicle video
A target detection and drone video technology, applied in the field of target detection and tracking based on drone video, can solve the problems of blurred lens, difficult continuous tracking, and high equipment requirements, and achieve good robustness.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0019] The present invention will be described in further detail below in conjunction with the accompanying drawings.
[0020] The invention includes two modules of LK optical flow detection and KCF tracking.
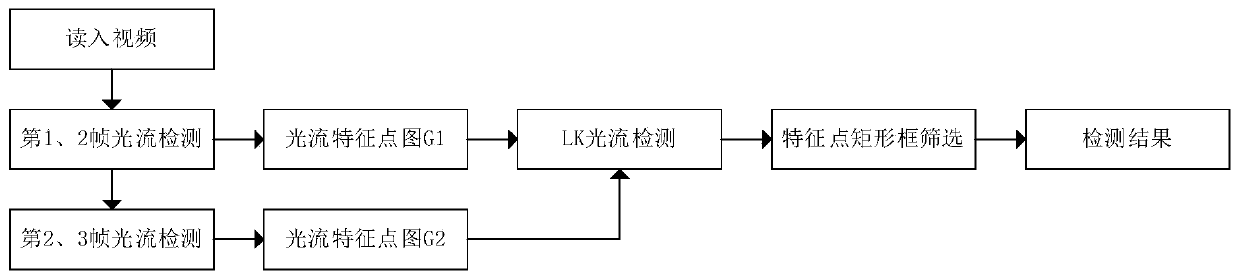
[0021] Such as figure 1 As shown in the structure diagram, in the detection module, LK optical flow detection is continuously performed on the initial three frames of a given video. Since the first and second optical flow detections can already initially detect the moving feature points in the image, And it can do preliminary screening, and then perform a third optical flow detection on the processed image after two optical flow detections, which can achieve the effect of further screening.
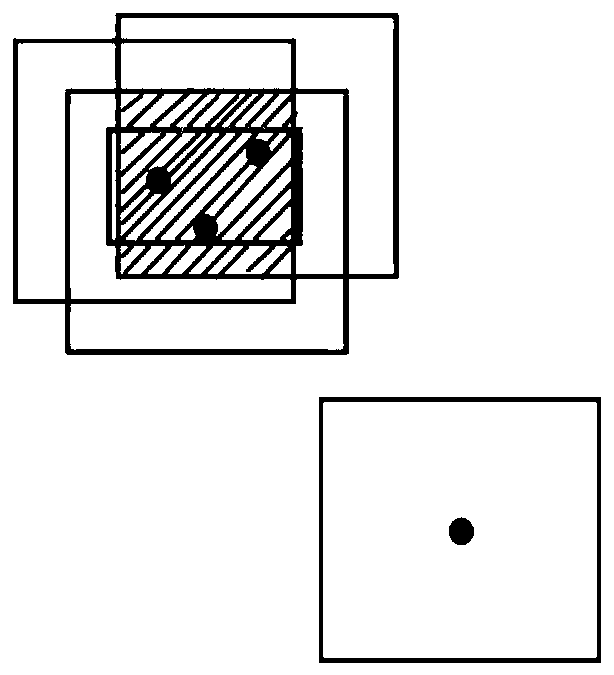
[0022] Such as figure 2 As shown in the schematic diagram, the rectangular frame screening is another key step in the feature point screening step in the LK optical flow detection module, because the input result of KCF in the present invention is the rectangular frame of the ar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More