

Three-dimensional object pose estimation method based on PVFH characteristics
A pose estimation, three-dimensional object technology, applied in computing, image data processing, instruments, etc., can solve problems such as low recognition accuracy, inability to recognize rotationally symmetric or mirror-symmetric objects, and difficulty in widely applying the Bin-picking system.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
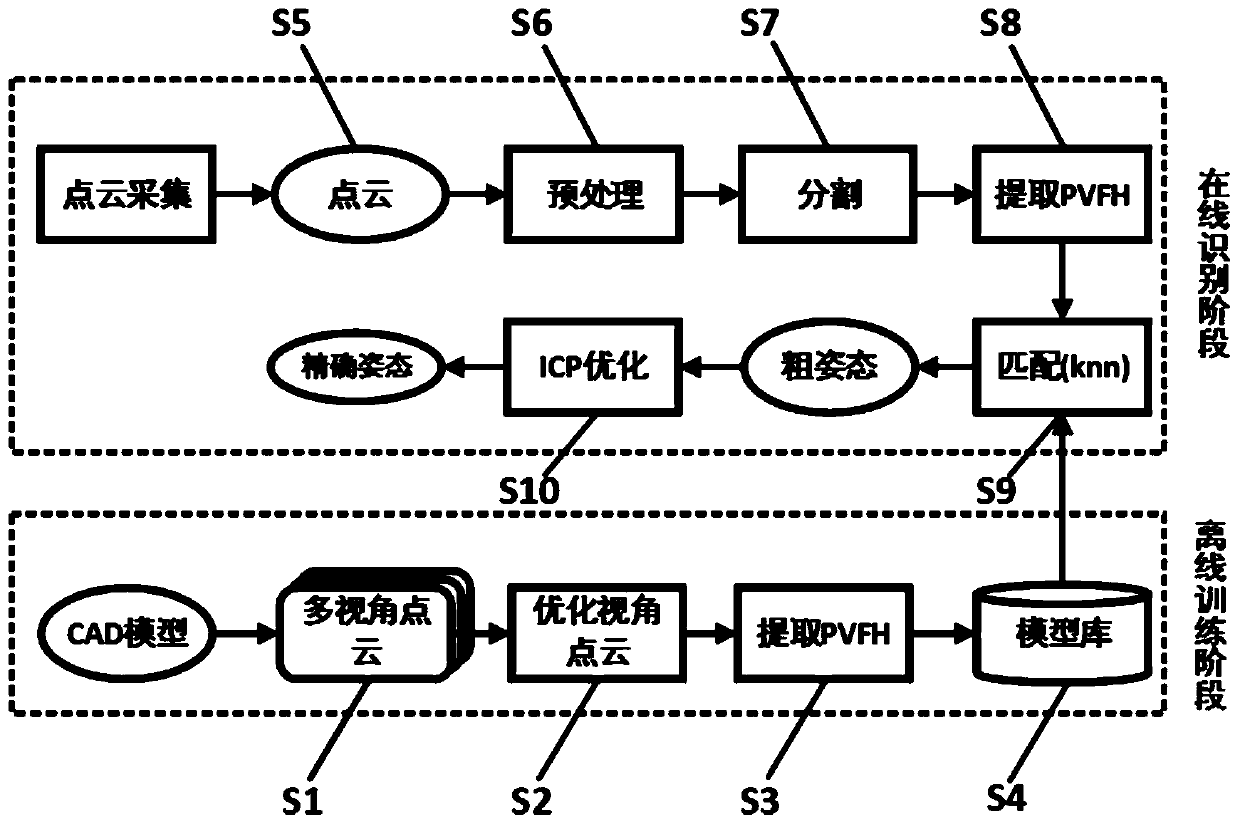
[0034] see figure 1 , which is a flow chart of the three-dimensional object pose recognition method of the present invention, the method includes an offline training stage and an online recognition stage. The online recognition phase is performed after the offline training phase is completed. Combine below Figure 2-7 , to describe each step of the two stages in detail.
[0035] 1. Offline training phase
[0036] The main purpose of this stage is to build a feature model library for feature matching in the subsequent online recognition stage. Include the following steps:
[0037] S1: Render the CAD model in different viewing directions, and obtain point clouds of multiple viewing angles of the CAD model. Obtaining steps:
[0038] S11: In three-dimensional space, construct a regular icosahedron containing the entire CAD model.
[0039] S12: Set up a virtual camera at the center or vertex of each face of the icosahedron, and each camera represents a viewing angle.
[004...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More