

Unscented Kalman filtering (UKF) based combined attitude determining method and satellite attitude control system
An unscented Kalman and attitude-fixing technology, applied in attitude control and other directions, can solve problems such as ignoring the characteristics and physical meaning of quaternion operations, complex derivation of the discretization process, and discretization errors.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
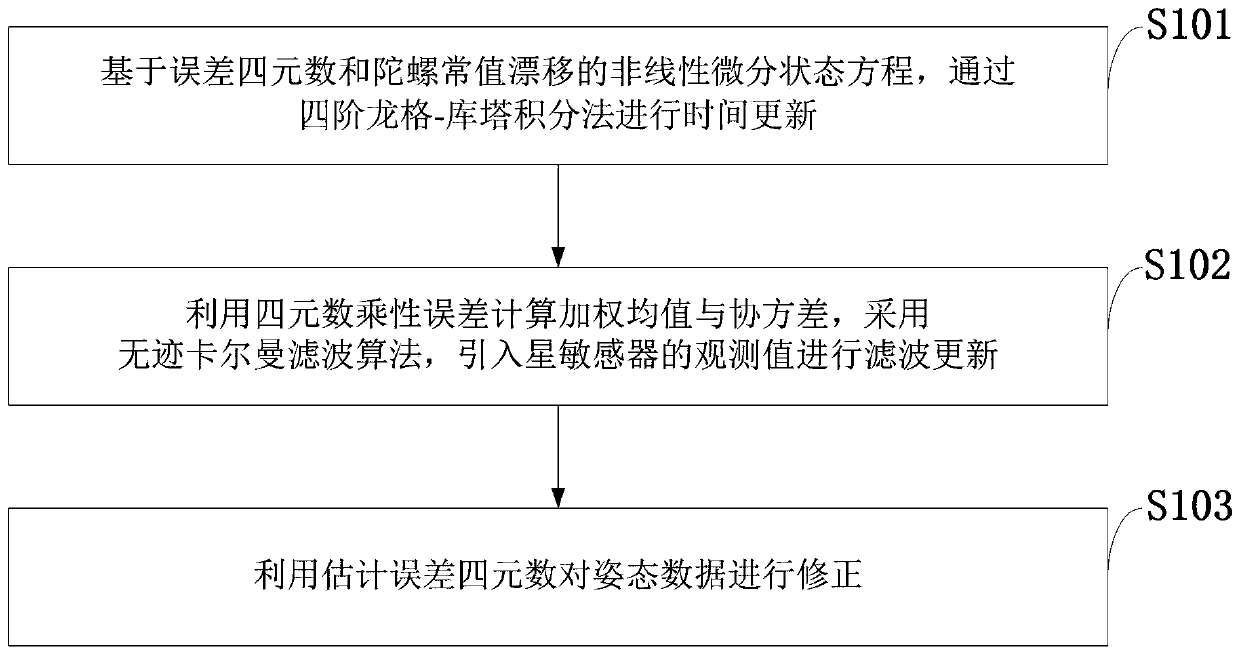
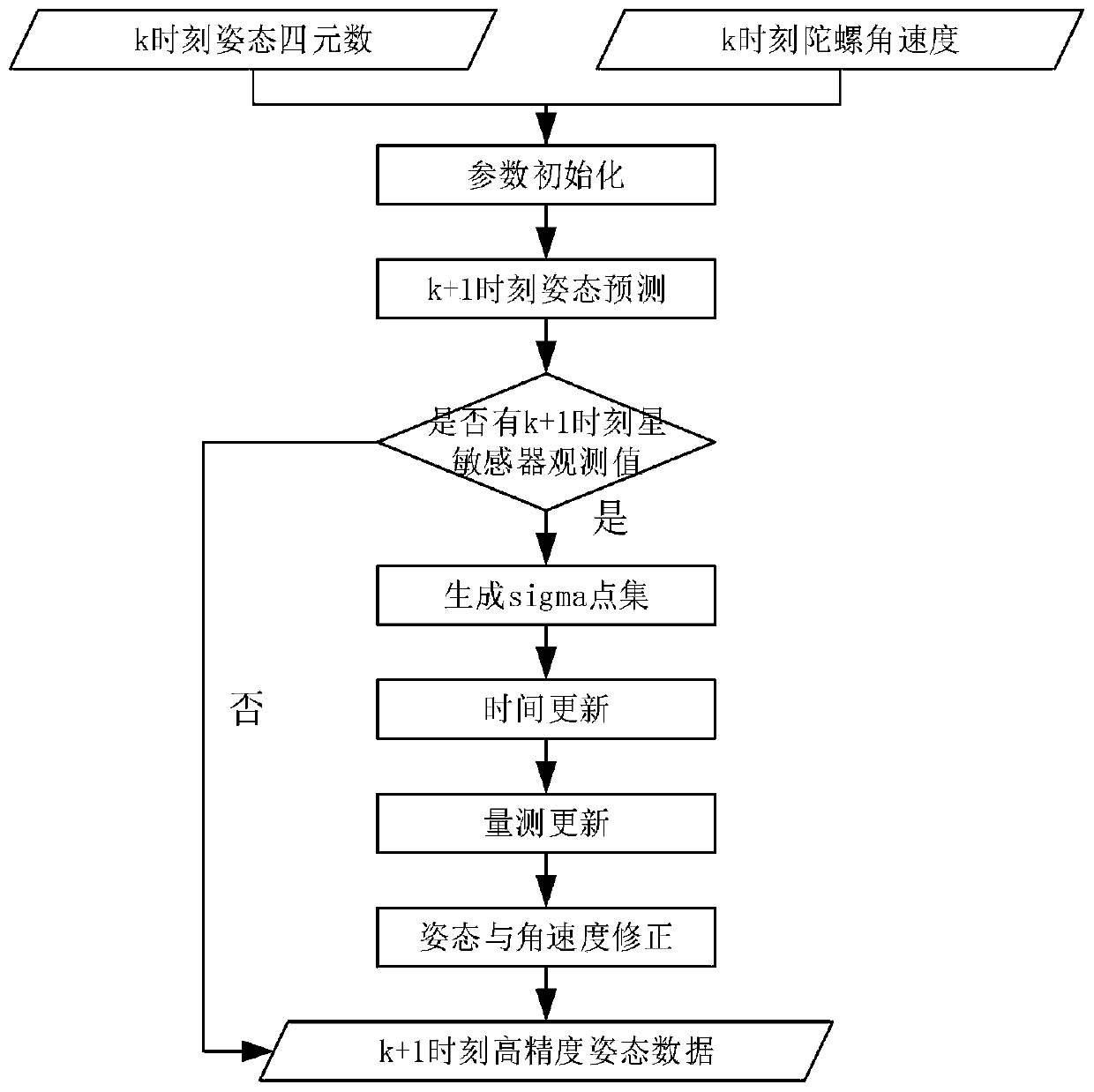
[0055] The present invention is based on the UKF star sensor and gyroscope joint attitude determination algorithm, constructs the nonlinear state equation in differential form, and uses the fourth-order Runge-Kutta integral method to solve the time update of the state variable; avoids the discreteness of the nonlinear differential state equation The UKF algorithm is used to filter and correct the quaternion of the star sensor and the angular velocity of the gyroscope; in addition, the multiplicative error of the quaternion is introduced to ensure the normalization constraint properties and geometric meaning of the quaternion...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More