

Robot positioning method and device based on SLAM (Simultaneous Localization And Mapping) of covariance intersection fusion
A technology of robot positioning and covariance intersection, applied in the direction of navigation calculation tools, etc., can solve the problems of lack of linear error and high cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0069] In order to make the purpose, technical solution and advantages of the present application clearer, the present application will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present application, not to limit the present application.
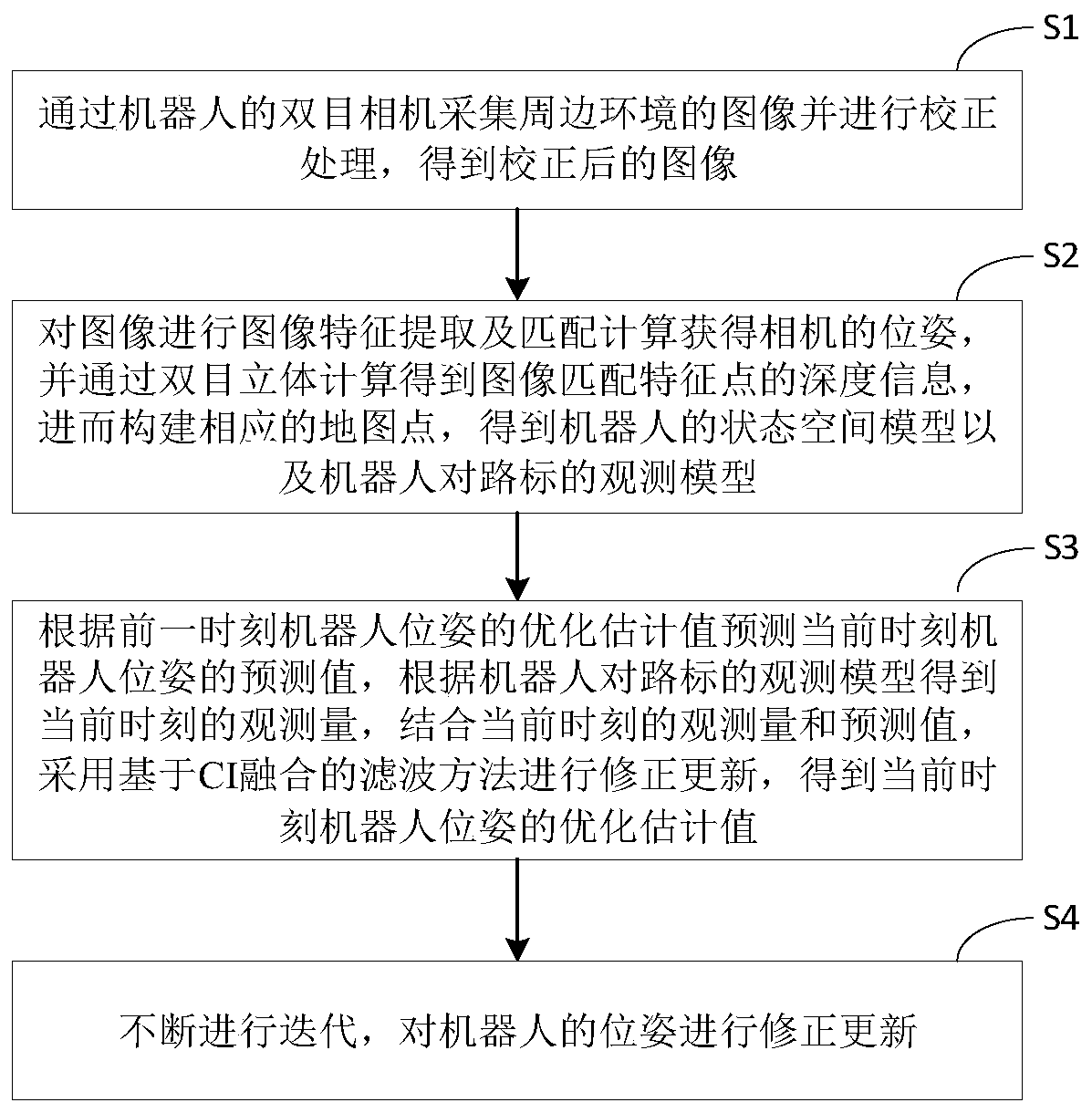
[0070] This application provides a robot positioning method based on covariance cross fusion SLAM, such as figure 1 shown, including:
[0071] Step S1. Collect images of the surrounding environment through the binocular camera of the robot and perform correction processing to obtain a corrected image.
[0072] The robot is deployed in the application environment. In this embodiment, the robot is equipped with a binocular camera. The binocular camera works to collect images of the surrounding environment, and corrects the collected images to obtain a corrected image. Usually the binocular...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More