

Tree climbing and pruning robot based on flexible tools
A robot and pruning technology, applied in the direction of motor vehicles, cutting tools, gardening tools/equipment, etc., can solve the problems of bad roads, fast-growing forests, dangerous operations, and low efficiency of pruning methods, and achieve compact and smooth structure The effect of low speed requirements and stable climbing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The following is based on Figure 1 to Figure 10 The specific implementation manner of this technology is further explained:
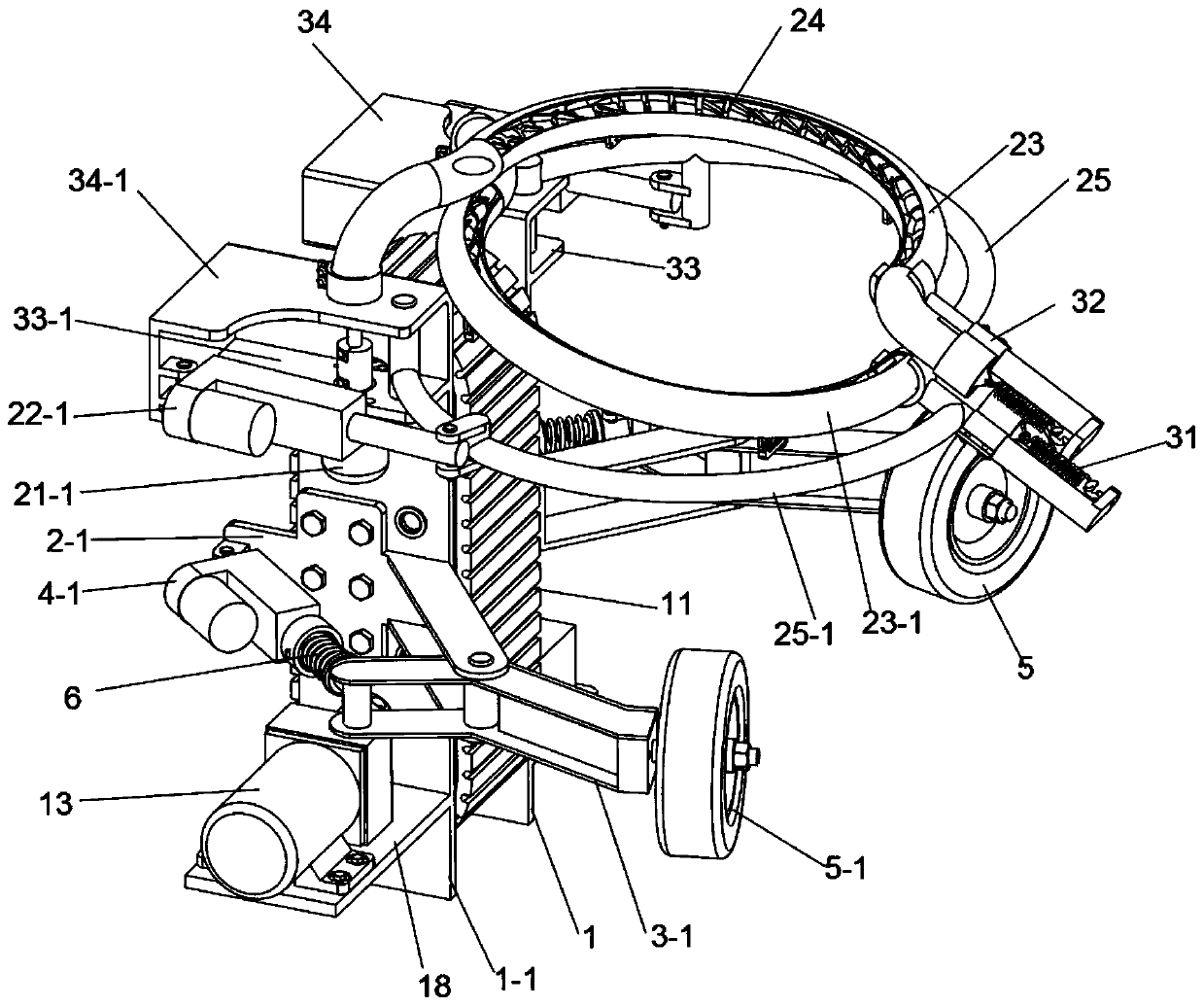
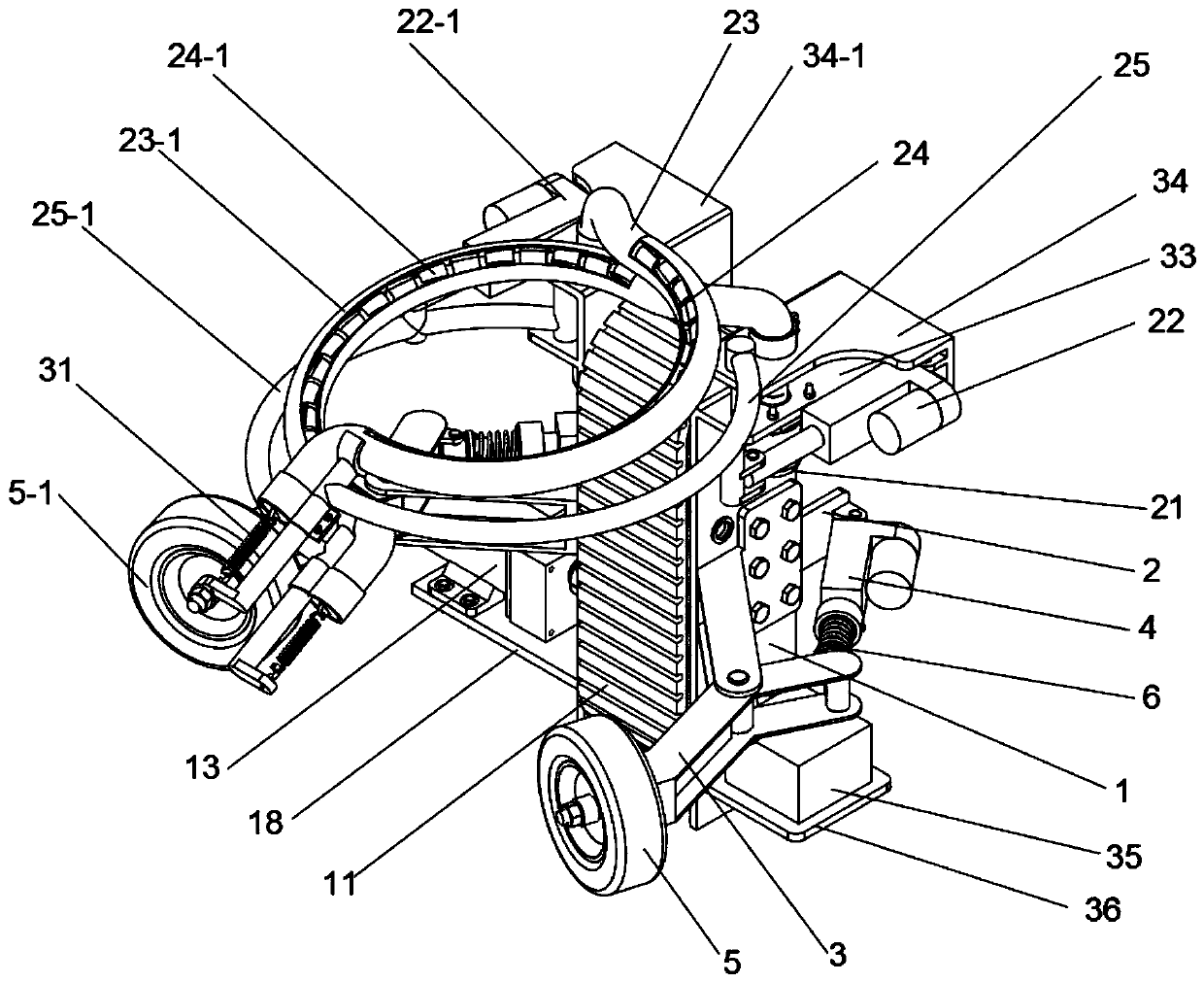
[0041] see figure 1 with figure 2 , a tree-climbing and pruning robot based on flexible cutters, comprising a left frame 1-1, a right frame 1, a tree-climbing mechanism, an embracing and clamping mechanism, and a pruning mechanism.
[0042] Wherein the clamping mechanism includes left fixed clamping arm plate 2-1, right fixed clamping arm plate 2, left clamping arm 3-1, right clamping arm 3, left clamping electric push rod 4-1, right clamping arm Tighten the electric push rod 4, the left tire 5-1 and the right tire 5; External expenditure, the cylinder end of the left clamping electric push rod 4-1 and the middle part of the left clamping arm 3-1 are all hinged on the left fixed clamping arm plate 2-1, and the left clamping electric push rod 4-1 The end of the drive rod is fixedly connected to the buffer spring 6 and the other end of the bu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More