

Multi-leg cooperative control method for underwater multi-leg robot system
A multi-legged robot, collaborative control technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of communication delay, multi-legged robot computing speed and signal transmission path influence, etc., to meet the needs of flexible movement. Sexual requirements, flexibility to change, and the effect of avoiding communication burdens
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
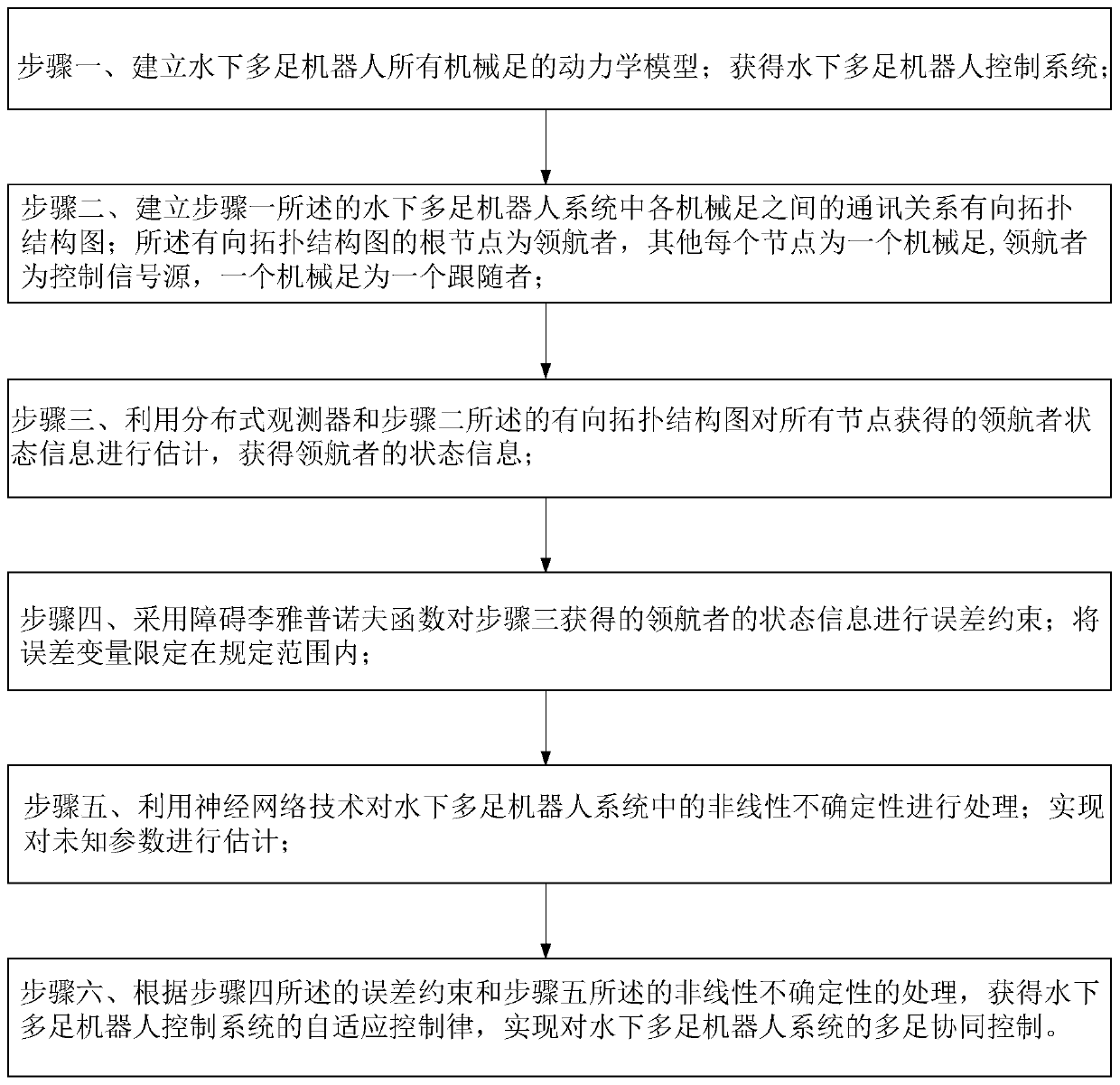
[0034] Specific implementation mode one: the following combination figure 1 Describe this embodiment mode, a kind of multi-legged cooperative control method of underwater multi-legged robot system described in this embodiment mode, the specific steps of this method include:
[0035] Step 1. Establish dynamic models of all mechanical feet of the underwater multi-legged robot; obtain the control system of the underwater multi-legged robot;
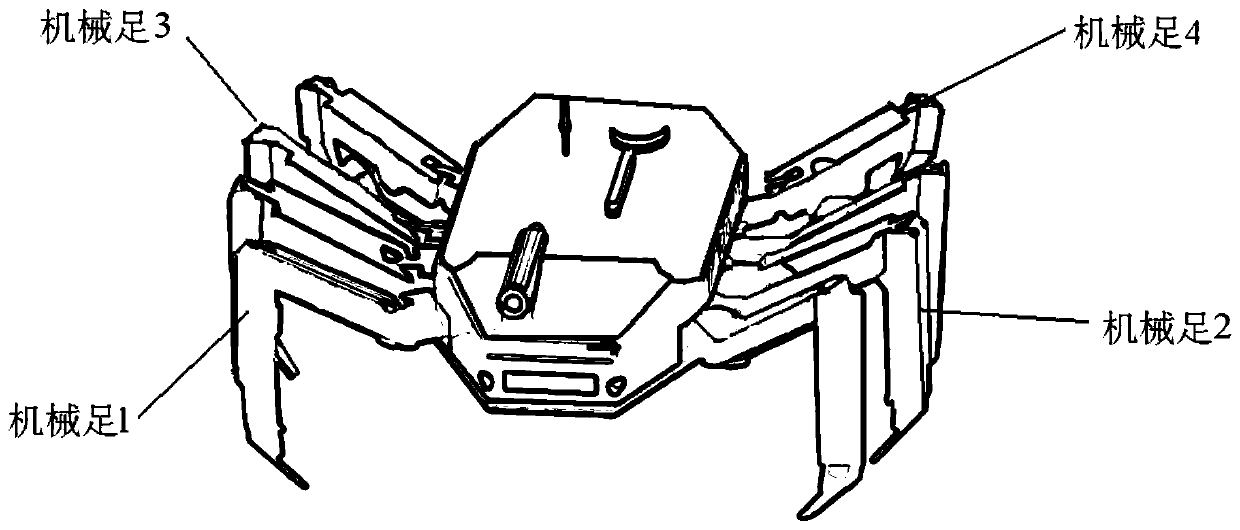
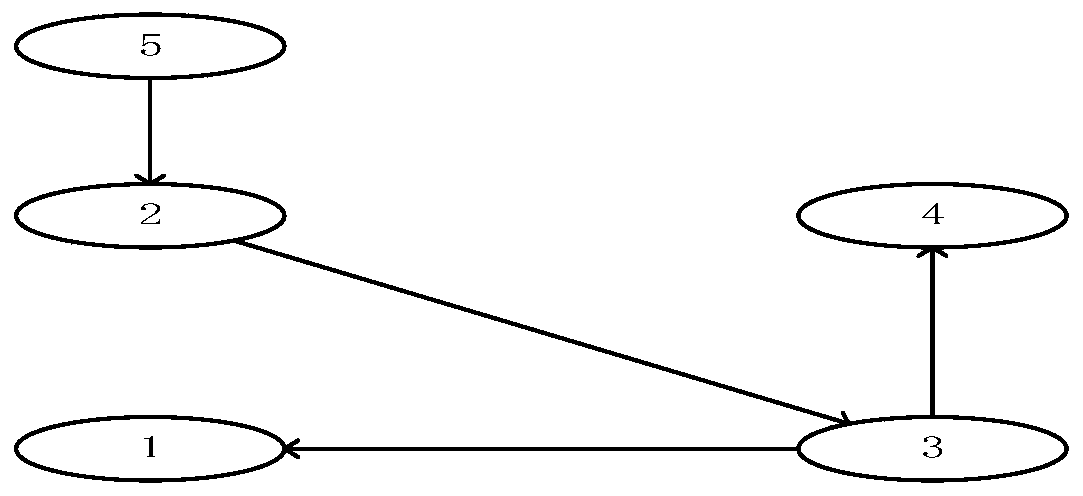
[0036] Step 2. Establish a directed topological structure diagram of the communication relationship between each mechanical foot in the underwater multi-legged robot system described in step 1; the root node of the directed topological structure diagram is the navigator, and each other node is a Mechanical feet, the leader is the control signal source, and one mechanical foot is a follower;
[0037] Step 3, using the distributed observer and the directed topology graph described in step 2 to estimate the state information of the leader obta...
specific Embodiment approach 2
[0044] Specific embodiment two: This embodiment further explains the multi-legged cooperative control method of an underwater multi-legged robot system described in the first embodiment. In this embodiment, all the mechanical parts of the underwater multi-legged robot described in step The method of the dynamic model of the foot is the same, and the dynamic model of the i-th mechanical foot is taken as an example to illustrate, specifically:
[0045]
[0046] Among them, q i is the joint rotation angle of the i-th mechanical foot, i={1,2,....,n}, n is a positive integer, is the joint rotational angular velocity of the i-th mechanical foot, is the joint rotational angular acceleration of the i-th mechanical foot, and q i , R p is a p-dimensional real column vector, τ i Indicates the input control force of the i-th mechanical foot, τ i ∈ R p ,M i (q i ) represents a symmetric positive definite inertia matrix, M i (q i )∈R p×p , R p×p is a real number matrix wi...
specific Embodiment approach 3
[0047] Specific embodiment three: This embodiment further explains the multi-legged cooperative control method of an underwater multi-legged robot system described in embodiment two. In this embodiment, the use of distributed observers described in step three and step two The directed topology graph estimates the state information of the leader obtained by all nodes, and the specific method for obtaining the state information of the leader is as follows:
[0048] Since the kinetic model described in formula (1) satisfies the property:
[0049] Property 1: Matrix is antisymmetric, then there are: for
[0050] Property 2: There are two positive numbers and B make where I p Represents the p×p identity matrix.
[0051] Therefore, the generalized coordinate q of the navigator n+1 Expressed as:
[0052]
[0053] q n+1 = Fv (3)
[0054] Among them, v is the auxiliary state variable of the leader, v∈R m , is the derivative of v, S and F are constant real matrix,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More