

Guide device, landmark layout method and guide method based on multi-view vision and inertial navigation
A multi-eye vision and guidance device technology, applied in the field of guidance devices based on multi-eye vision and inertial navigation, can solve problems such as poor operation reliability, low positioning accuracy, and poor navigation flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] In order to facilitate the understanding of those skilled in the art, the present invention will be further described below in conjunction with the embodiments and accompanying drawings, and the contents mentioned in the embodiments are not intended to limit the present invention.
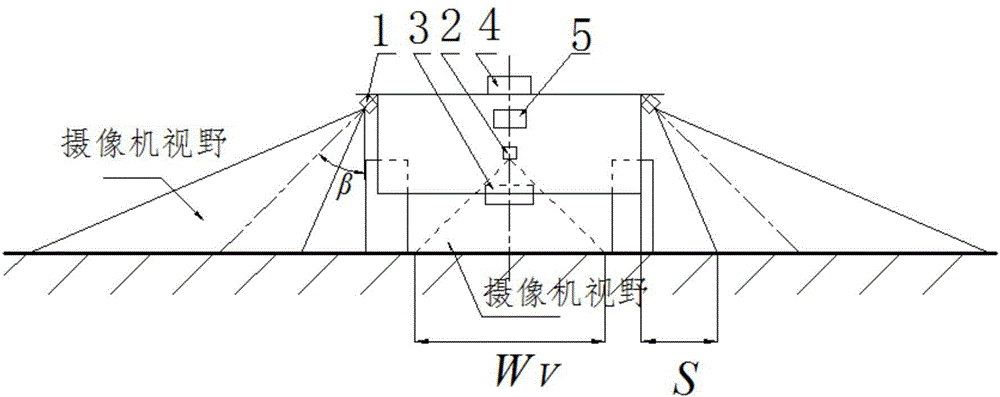
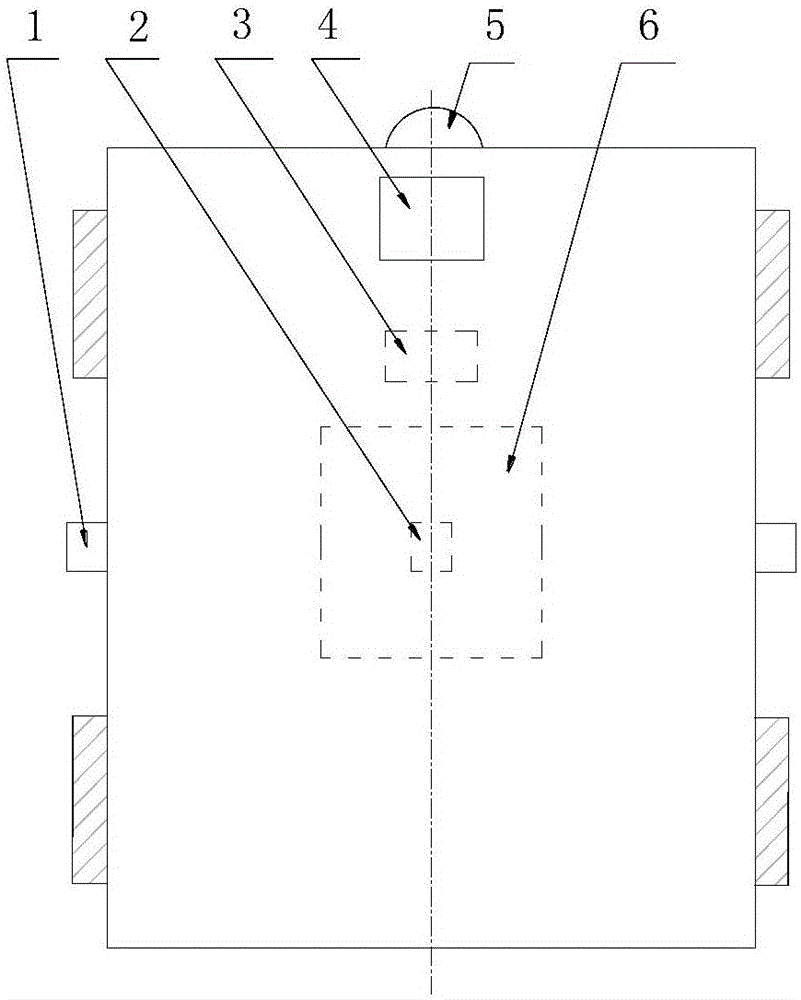
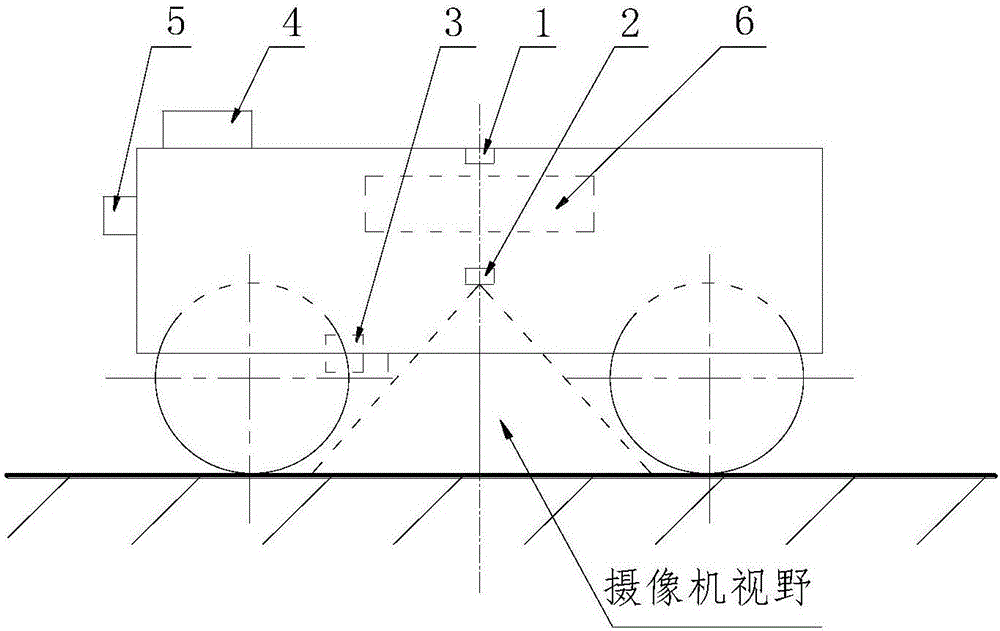
[0061] refer to Figure 1 to Figure 3 As shown, the guidance device based on multi-eye vision and inertial navigation of the present invention includes: side camera 1, center camera 2, radio frequency card reader 3, inertial measurement unit 4, obstacle sensor 5, guidance controller 6 Wherein, the lateral camera 1 is installed obliquely downward on the left and right sides of the car body (that is, the car body of the automatic guided vehicle); the center camera 2 is installed vertically downward on the central axis of the car body, and the left and right boundaries of its field of view are in line with the The lateral boundaries of the vehicle body are parallel, and the field of view width ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More