A force feedback control method, device and wearable device for wheel stop
A control method and force feedback technology, applied in the direction of program-controlled manipulators, manufacturing tools, manipulators, etc., can solve the problems of destroying the execution contact force of the executed object and failing to meet the required value, and achieve the goal of improving the sense of immersion, the agility of response, and the improvement of The effect of ergonomics
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
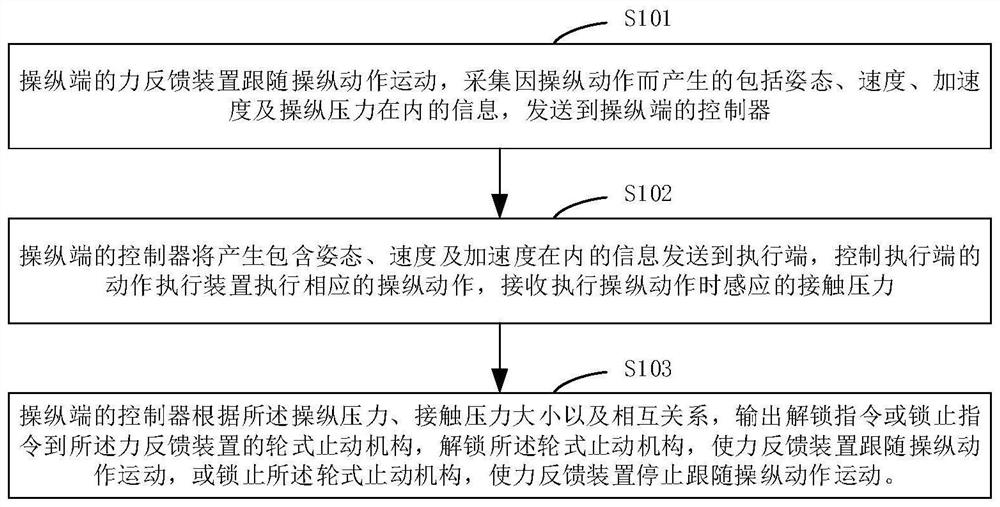
[0042] This embodiment discloses a force feedback control method for a wheel stop, such as figure 1 shown, including the following steps:
[0043] Step S101, the force feedback device at the control end follows the movement of the control action, collects information including posture, velocity, acceleration and control pressure generated by the control action, and sends it to the controller at the control end;
[0044] Step S102, the controller at the manipulation end sends the generated information including attitude, velocity and acceleration to the execution end, controls the action execution device at the execution end to execute the corresponding manipulation action, and receives the contact pressure sensed during the execution of the manipulation action;
[0045] Step S103, the controller at the manipulating end outputs an unlocking command or a locking command to the wheel stop mechanism of the force feedback device according to the manipulating pressure, the magnitude...
Embodiment 2
[0077] This embodiment discloses a joint remote control device based on force feedback, including a manipulation end and an execution end;
[0078] The control end includes a force feedback device and a controller;
[0079] The force feedback device is used to follow the movement of the manipulation action, collect information including attitude, speed, acceleration and manipulation pressure generated by the manipulation action, and send it to the controller at the manipulation end;
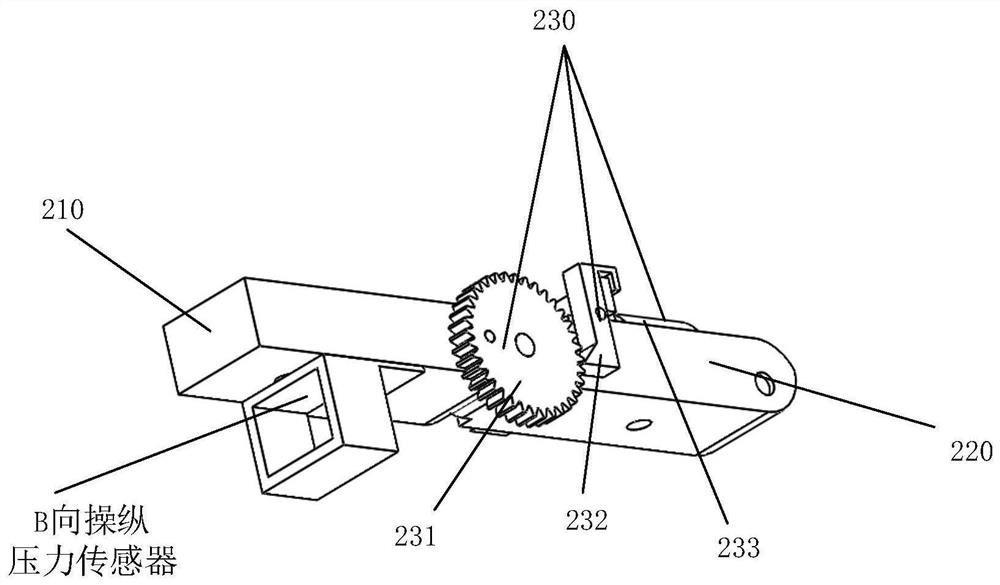
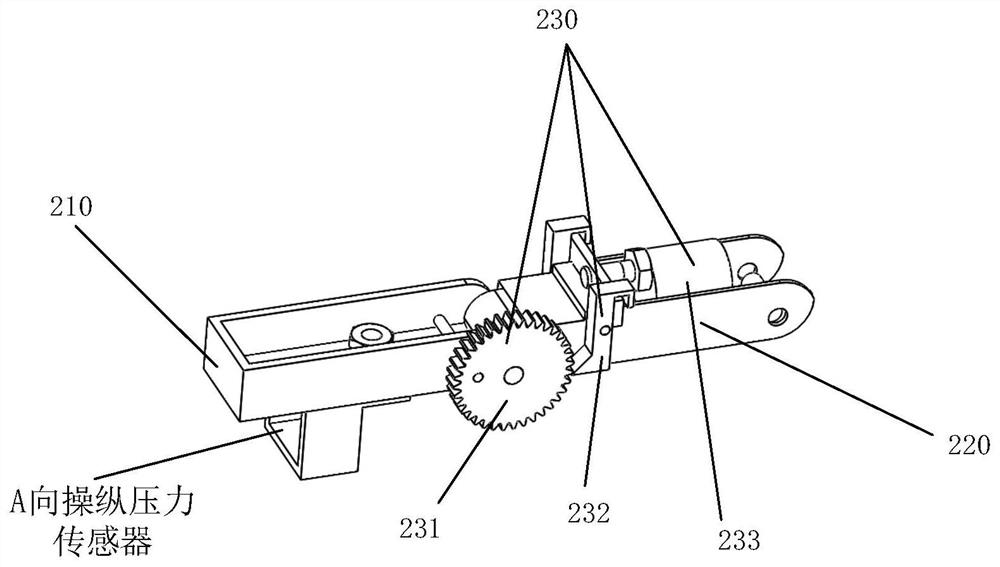
[0080] Preferably, the force feedback device at the control end is composed of connections such as figure 2 or 3;
[0081] The controller is used to send the generated information including posture, velocity and acceleration to the execution end, control the action execution device on the execution end to execute the corresponding manipulation action, and receive the contact pressure sensed when performing the manipulation action; and according to the manipulation pressure , the contact pressu...
Embodiment 3
[0085] This embodiment discloses a wearable remote control device. This embodiment takes the remote control of a robot hand as an example, such as Figure 7 As shown, it is a driving device that can be worn on the palm, and each joint of the driving device includes a force feedback device as in Embodiment 2; all force feedback devices generate the palm movements collected by the driving device, including gestures , speed, acceleration and operating pressure information, sent to the controller of the drive device;
[0086] Such as Figure 7 As shown, it is the driven robot limb, that is, the robot palm. Each joint of the robot palm includes an action execution device as in Embodiment 2; the action sent by the drive device that can be worn on the palm is executed through the controller, and the feedback Perceived external force.
[0087] When the drive device wearable on the palm controls the driven robot limbs to perform actions, sample the force feedback control method based o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com