

Lane positioning method for self-driving container trucks in the wharf quay bridge area
A container truck and autonomous driving technology, which is applied in the field of lane positioning of autonomous container trucks in the quayside bridge area, can solve the problems of low efficiency, high cost, and small information transmission range, so as to reduce costs, facilitate positioning, and improve positioning. The effect of precision and efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0045] The specific implementation of the present invention will be described in detail below in conjunction with preferred embodiments.
[0046] In order to solve the problems mentioned, this embodiment provides a method for lane positioning of self-driving container trucks in the wharf quay bridge area, the specific steps are as follows:
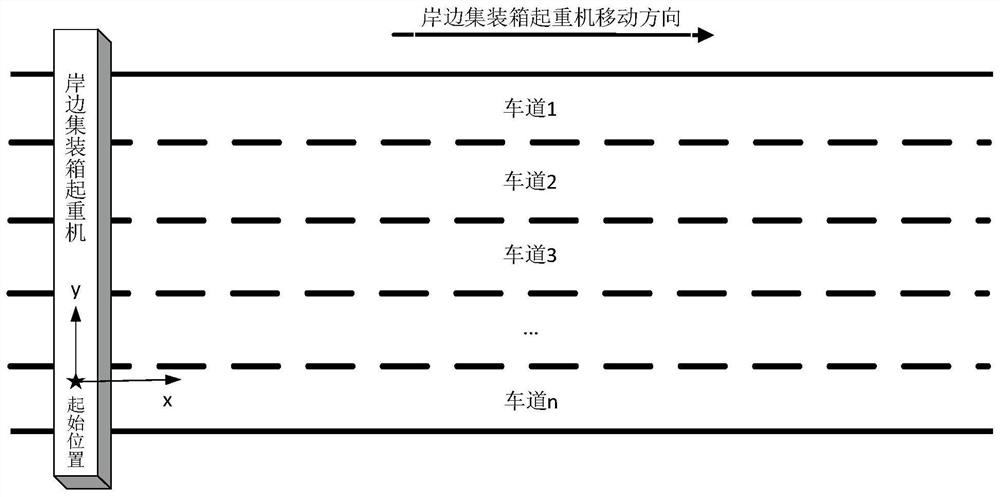
[0047] Step 1. Obtain the initial position of the shore container crane
[0048] Assuming that the container cranes on the shore move from left to right, it is first necessary to obtain the starting positions of all container cranes on the shore, such as figure 1 shown. In order to obtain the initial position, use theodolite or mobile GPS receiver (Sinan T30, high-precision GPS engineering stakeout receiver road survey point stakeout point measuring instrument) to collect the GPS position of the container crane and obtain its plane coordinates (x ori ,y ori )(like figure 1 As shown, x is the direction parallel to the lane line, and y i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More