

Intelligent mobile service robot with laser and vision fusion obstacle avoidance system
A mobile service and robot technology, applied in control/adjustment systems, instruments, non-electric variable control, etc., can solve problems such as high requirements on the smoothness of the reflective surface, the inability to realize the classification and identification of obstacles, and the inability to guarantee safety issues.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] In order to further explain the technical solution of the present invention, the present invention will be described in detail below through specific examples.
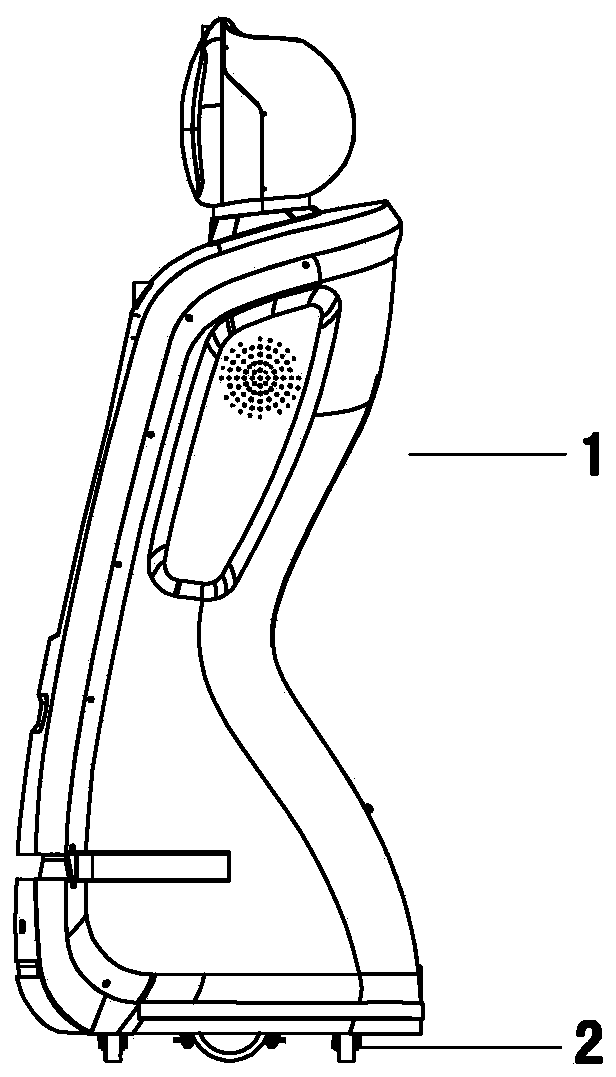
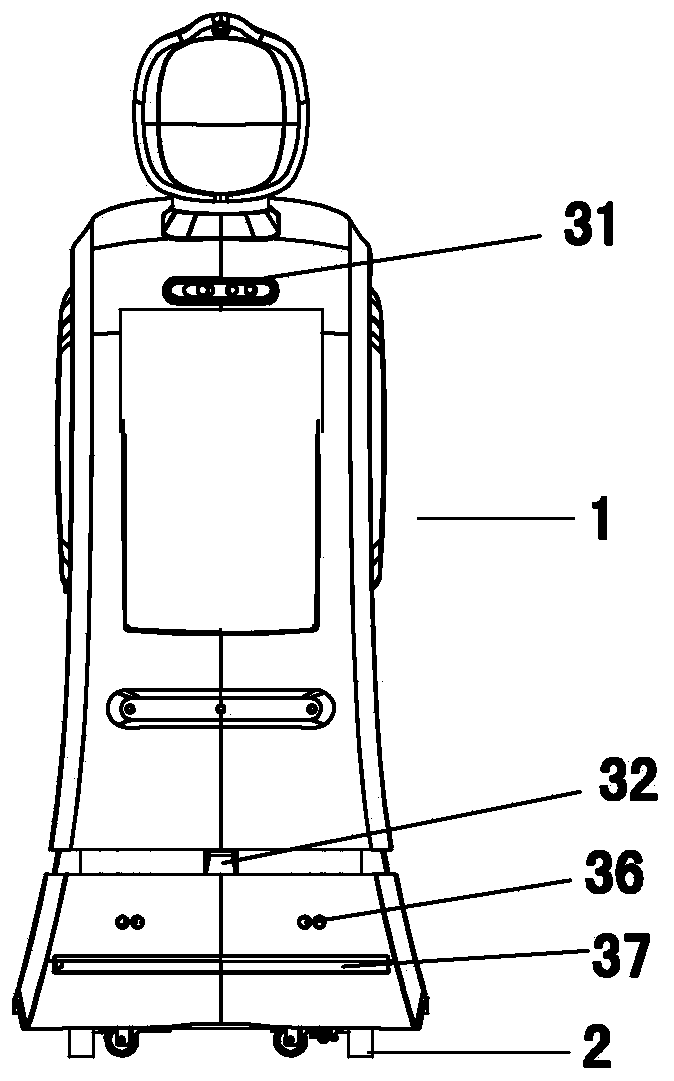
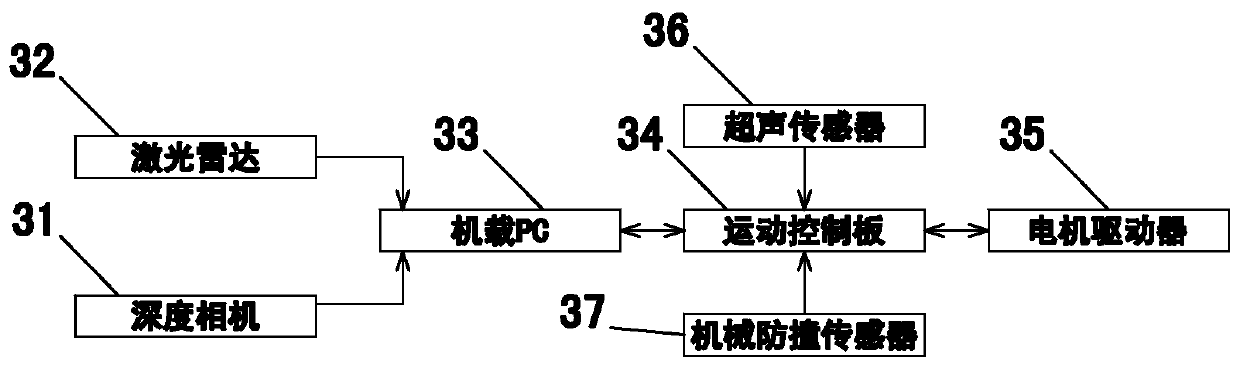
[0024] The intelligent mobile service robot with laser and vision fusion obstacle avoidance system disclosed by the present invention, such as figure 1 , figure 2 , image 3 and Figure 4 As shown, the intelligent mobile service robot in the figure is a fuselage main body 1 similar to the shape structure of a human body, and the bottom of the fuselage main body 1 is a walking mechanism 2. The intelligent mobile service robot of the present invention is different from the existing intelligent mobile service robot. The difference is that the intelligent mobile service robot of the invention includes a laser and visual fusion obstacle avoidance system, which includes a hardware system and a navigation obstacle avoidance system arranged on the main body of the fuselage. The specific hardware system includes a de...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More