

Patient-carrying medical mechanical arm error compensation system and method
An error compensation and robotic arm technology, applied in the field of error compensation systems for patient-carrying medical robotic arms, can solve problems such as heavy workload, difficulty in ensuring the accuracy and reliability of test results, and little consideration of the influence of robotic arm positioning accuracy, etc. Achieve the effect of improving absolute positioning accuracy, fast and efficient method, and real-time update
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
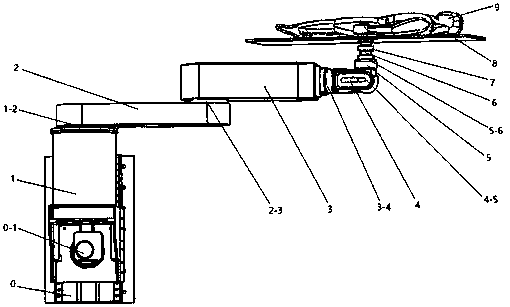
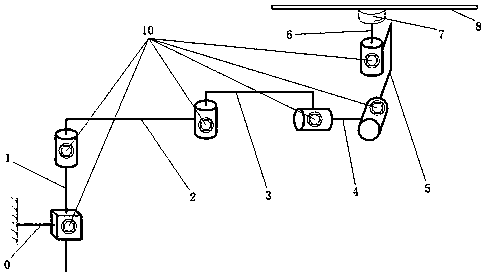
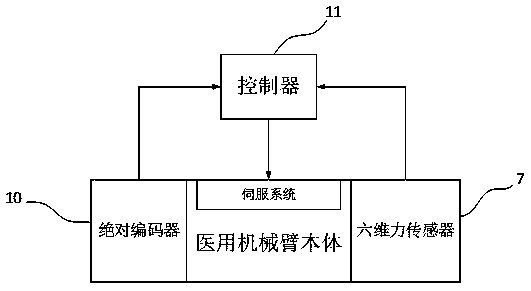
[0048] like Figures 1 to 3 As shown, an error compensation system for a patient-carrying medical robotic arm includes a controller 11 , a medical robotic arm body, an absolute encoder 10 and a six-dimensional force sensor 7 .
[0049] in:
[0050] The body of the medical manipulator includes a servo system and six joints that perform actions through the servo system; the end flange of the body of the medical manipulator is connected to the bed board 8 through a six-dimensional force sensor 7; the body of the medical manipulator specifically includes a manipulator base 0. The first rod 1 connected to the manipulator base 0, the second joint 2 connected to the first rod 1, the third rod 3 connected to the second joint 2, the third rod 3 connected to The fourth rod 4, the fifth rod 5 connected with the fourth rod 4, th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More