

Multi-directional laser vision tracking device and tracking and controlling method thereof
A visual tracking and multi-directional technology, applied in auxiliary devices, manufacturing tools, auxiliary welding equipment, etc., can solve the problems of large parts, unrecognizable, tracking and welding, complex structures, etc., to achieve small overall structure, reduce spatter and interference situation, the effect of increasing the welding rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
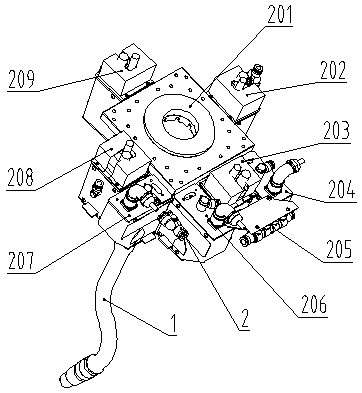
[0012] like figure 1 As shown, a multi-directional laser vision tracking device includes a special-shaped welding torch 1, a laser vision sensor 2 and a computer control system; the laser vision sensor 2 is installed at the end of the manipulator, and the special-shaped welding torch 1 is arranged at the lower end of the center of the laser vision sensor 2; The laser vision sensor 2 includes a flange frame 201, a first camera 202, a fourth camera 203, a third laser 204, an integrated pipeline 205, a first laser 206, a second laser 207, a third camera 208, and a second camera 209. The flange frame 201 is connected to the manipulator, the first camera 202 is arranged on the right side of the flange frame 201 , the second camera 209 is arranged on the front side of the flange frame 201 , and the third camera 208 is arranged on the left side of the flange frame 201 , the fourth camera 203 is arranged on the rear side of the flange frame 201, the first laser 206 is arranged on the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More