

Industrial robot variable parameter stiffness identification and modeling method
An industrial robot and modeling method technology, which is applied in the field of variable parameter stiffness identification and modeling of industrial robots, can solve the problems of unsatisfactory robot stiffness modeling accuracy and low applicability in the whole working space, so as to improve operation accuracy and improve Predictability, Workload Reduction Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] In order to facilitate the understanding of those skilled in the art, the present invention will be further described below in conjunction with the embodiments and accompanying drawings, and the contents mentioned in the embodiments are not intended to limit the present invention.
[0034] The stiffness identification equipment required by the technical solution of the present invention mainly includes: industrial robots, laser trackers (or other positioning acquisition sensors), six-dimensional force sensors, and the like.
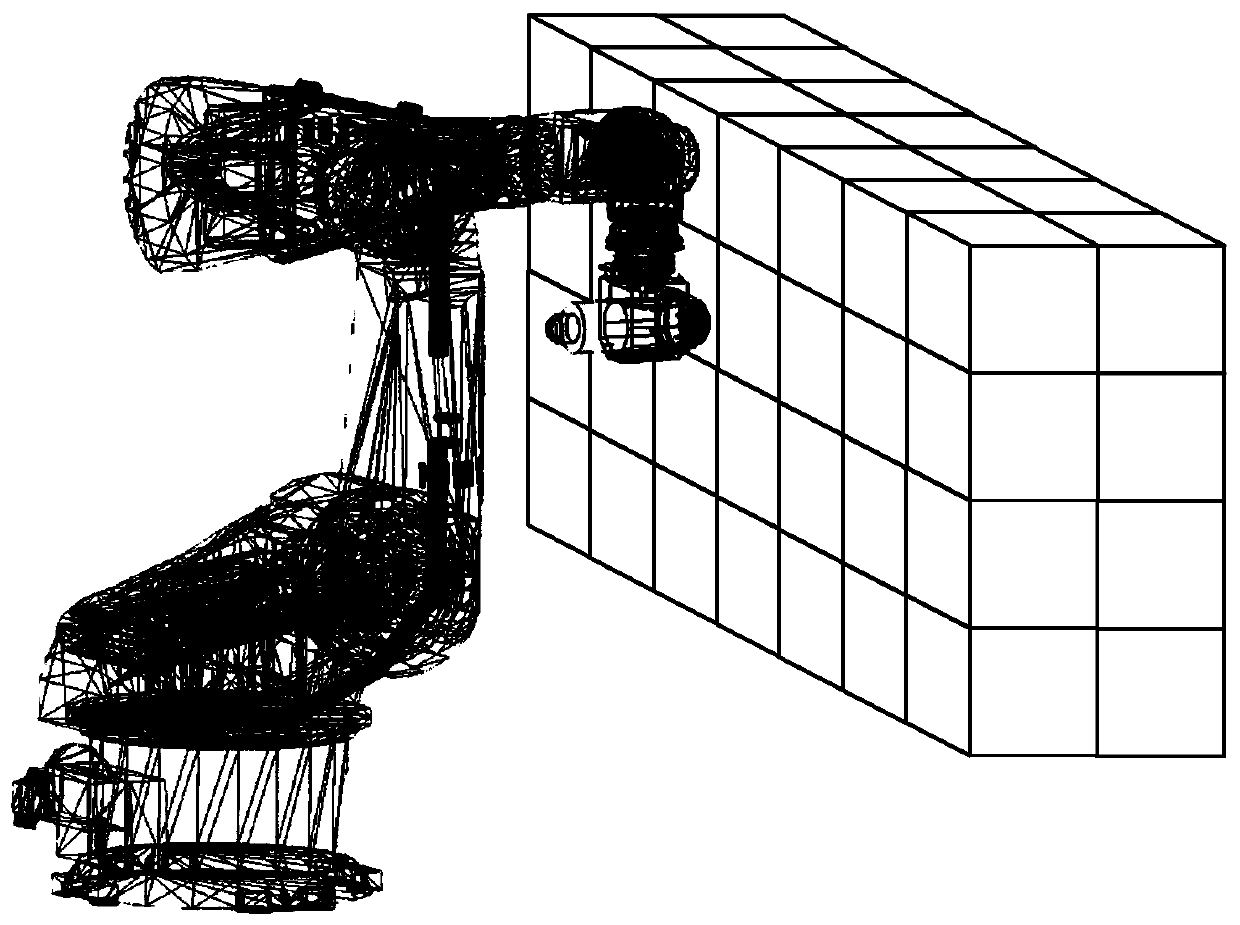
[0035] refer to figure 1 As shown, an industrial robot variable parameter stiffness identification and modeling method of the present invention includes the following steps:
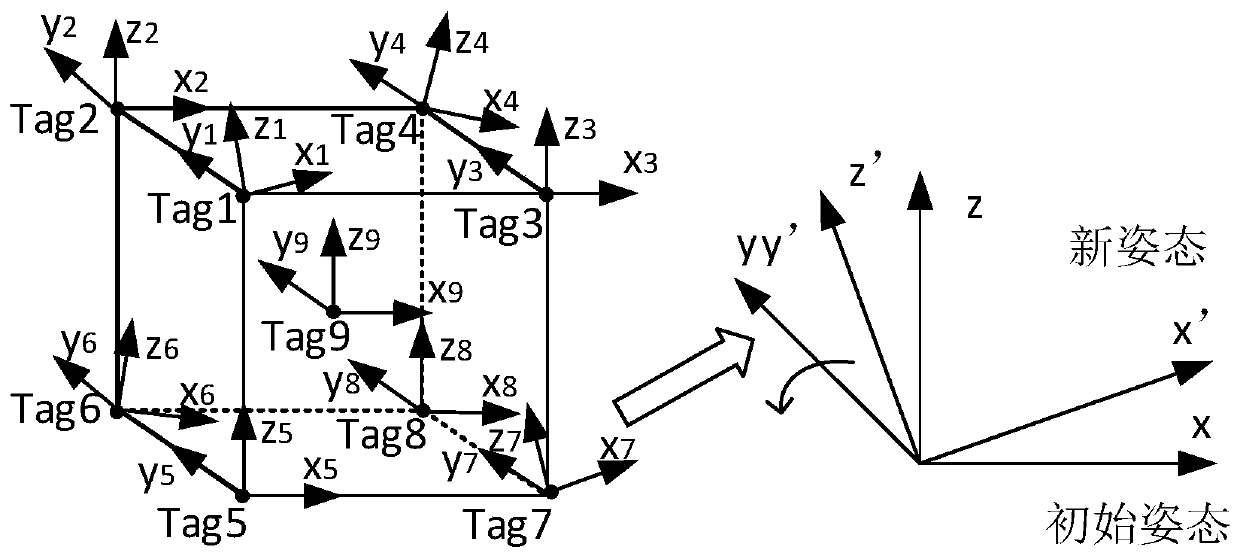
[0036] Step 1: Put the laser tracker in a suitable position for easy measurement. Use the laser tracker to measure and establish the coordinate system including the robot base coordinate system Base, the flange coordinate system Flange, the tool coordinate system Tool, and t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More