

Multi-station radar station location and joint tracking method based on distributed PHD
A radar station, distributed technology, applied in the direction of reflection/re-radiation of radio waves, utilization of re-radiation, measurement devices, etc., can solve the problems of poor system robustness, large communication burden, huge communication burden, etc., and achieve fast convergence speed , the effect of small amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
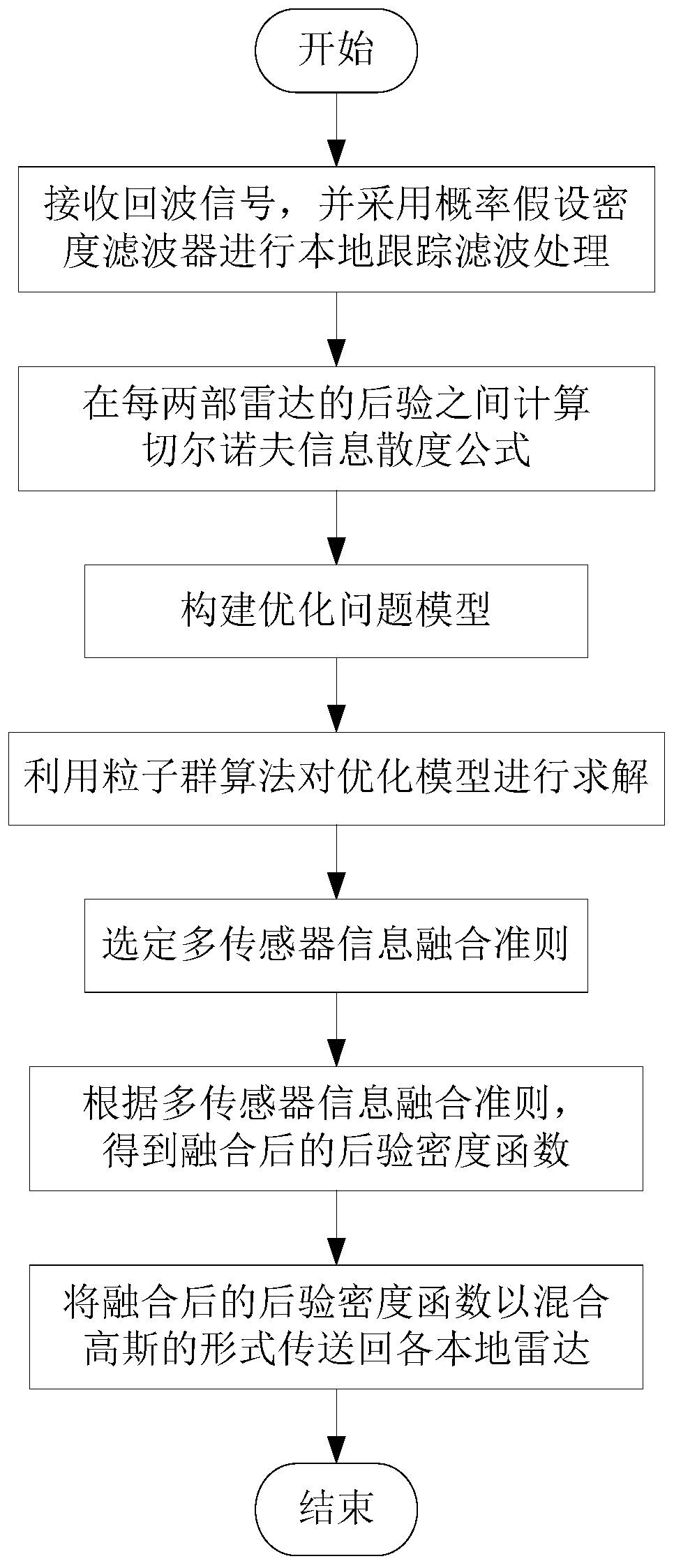
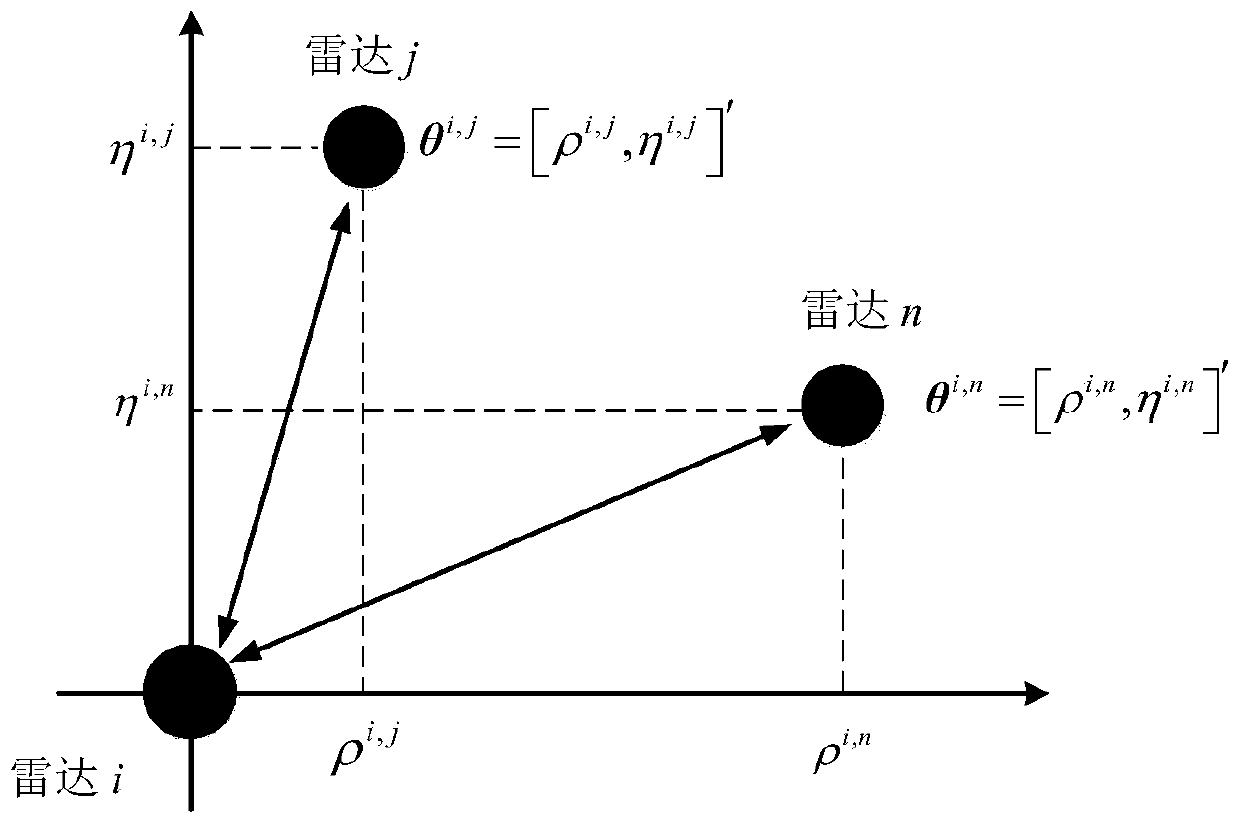
[0048]The solution of the present invention is that in the stage of multi-station radar site positioning, each radar uses PHD filter to perform local filtering and obtain the posterior information represented by the mixed Gaussian form, and then use these posterior information to calculate the distance between each two radars. The Chernoff information divergence of the particle swarm algorithm is used to optimize the Chernoff information divergence to obtain the relative position between each two radars. In the joint tracking stage, according to the obtained relative position of the radar, under the distributed framework, the posterior information is fused by using the generalized covariance intersection criterion, and the joint tracking result is obtained. The technical solution of the present invention will be further described below in conjunction with the accompanying drawings.
[0049] like figure 1 As shown, a multi-station radar site location and joint tracking method ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More