

Binocular camera calibration method and device, unmanned aerial vehicle and storage medium
A binocular camera and calibration method technology, applied in image data processing, instruments, calculations, etc., can solve problems such as troublesome operation, low calibration efficiency, and cumbersome calibration process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
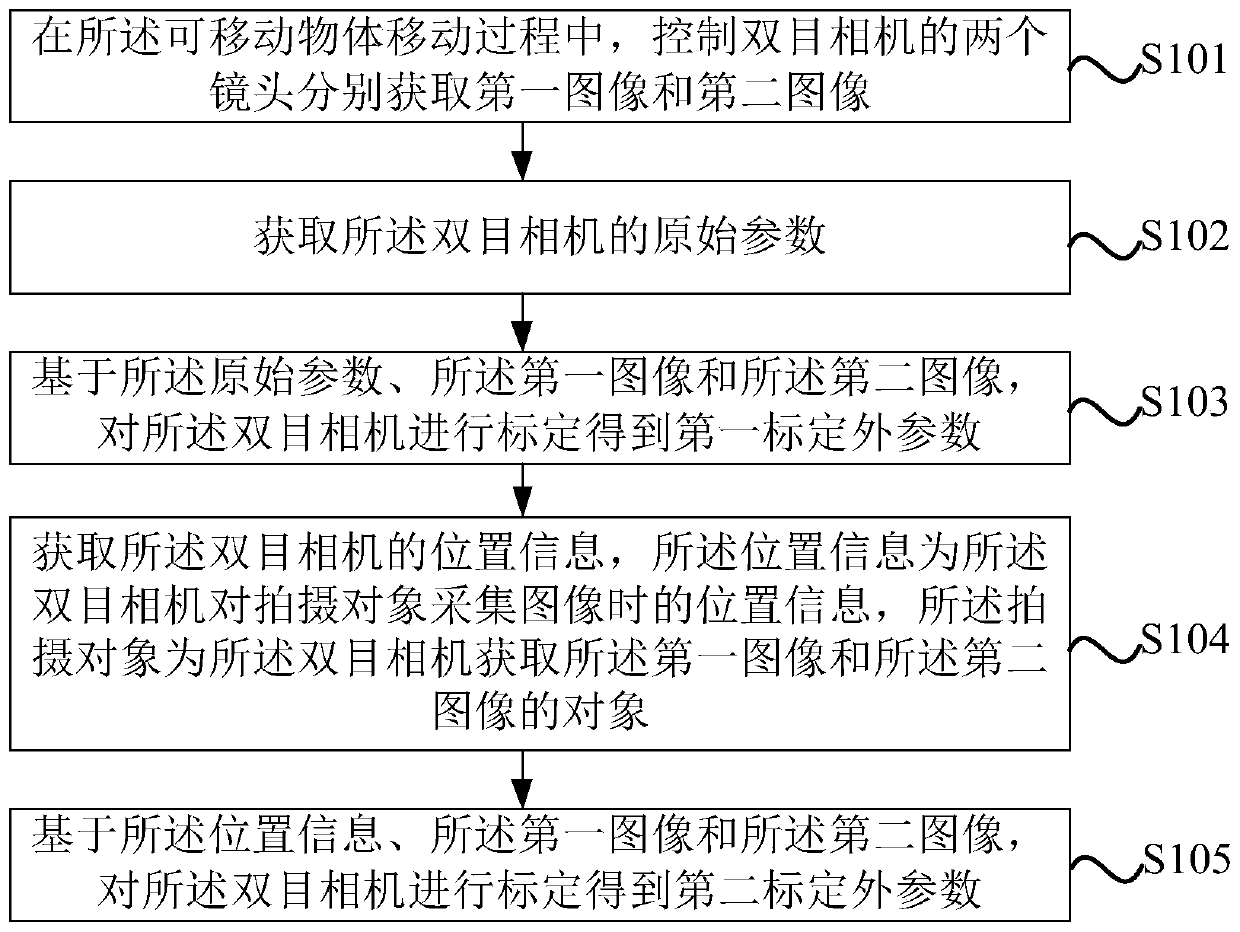
[0084] figure 1 It is a flow chart of a binocular camera calibration method provided by Embodiment 1 of the present invention. This embodiment can be applied to drones and other agricultural machinery equipment before performing distance measurement, obstacle avoidance, and environment recognition through binocular cameras. In the case where the target camera is calibrated, the method can be performed by the calibration device of the binocular camera in the embodiment of the present invention, and the device can be implemented in software and / or hardware, such as figure 1 As shown, the method specifically includes the following steps:
[0085] S101. During the moving process of the movable object, control two lenses of a binocular camera to obtain a first image and a second image respectively.
[0086] A binocular camera refers to a camera composed of two lenses with relatively fixed positions. The same scene is shot through the two lenses of the binocular camera, two images ...
Embodiment 2
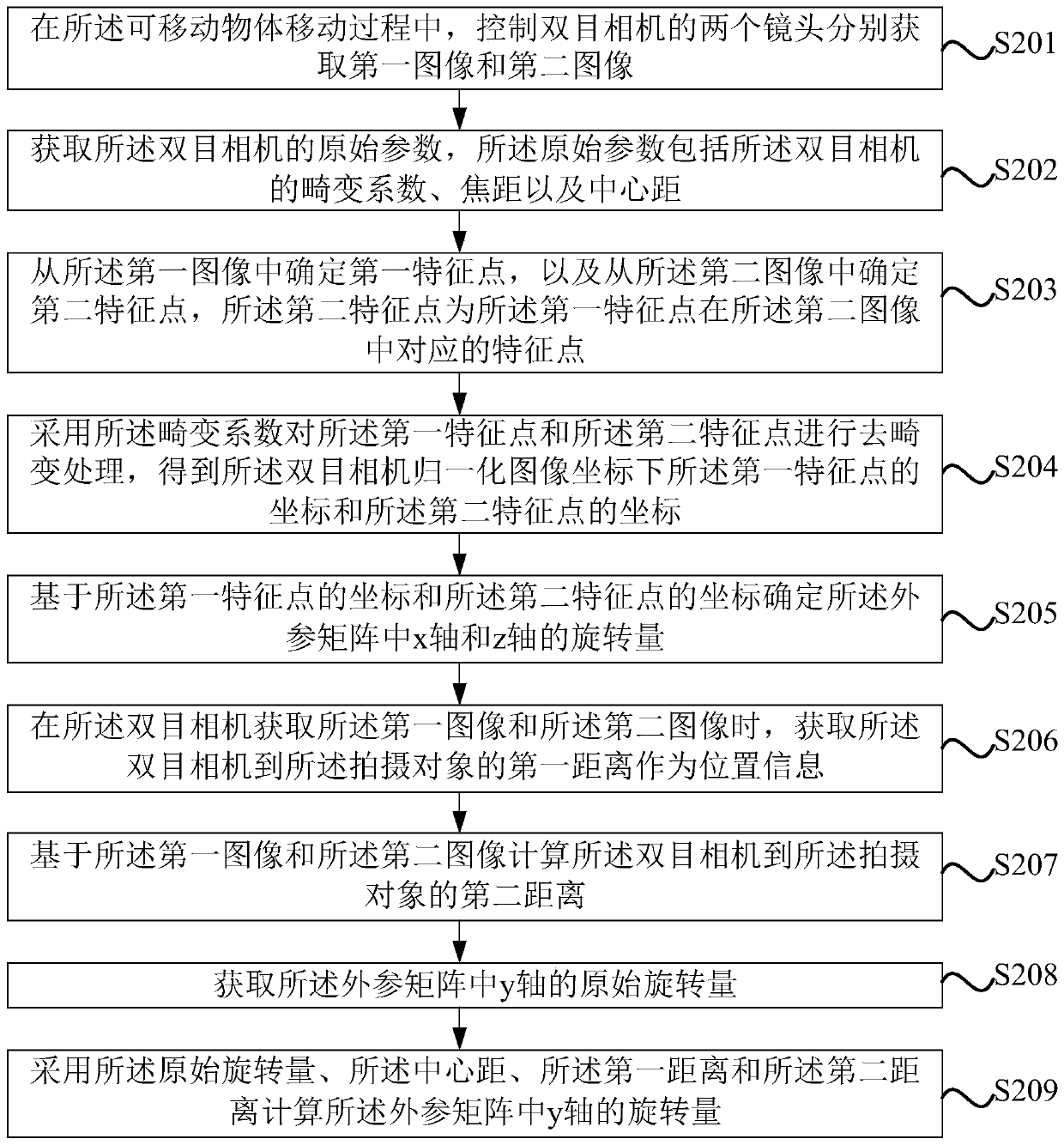
[0103] figure 2 It is a flow chart of a binocular camera calibration method in Embodiment 2 of the present invention. This embodiment is optimized on the basis of the foregoing Embodiment 1, and provides an example of calibrating the first calibration extrinsic parameters and the second calibration extrinsic parameters. The implementation method, specifically, the method of this embodiment may include the following steps:
[0104] S201. During the moving process of the movable object, control the two lenses of the binocular camera to acquire a first image and a second image respectively.
[0105] S202. Acquire original parameters of the binocular camera, where the original parameters include a distortion coefficient, a focal length, and a center distance of the binocular camera.
[0106] In the embodiment of the present invention, the distortion coefficient, the focal length and the center distance of the binocular camera can be read from the memory of the binocular camera. ...
Embodiment 3
[0148] Figure 3A It is a flowchart of a binocular camera calibration method provided by Embodiment 3 of the present invention. This embodiment provides another exemplary implementation method for calibrating the second external parameter of the binocular camera based on the aforementioned Embodiment 2. , specifically, the method of this embodiment may include the following steps:
[0149] S301. Control the two lenses of the binocular camera to acquire a first image and a second image respectively;
[0150] S302. Obtain the original parameters of the binocular camera, where the original parameters include the distortion coefficient, focal length, and center distance of the binocular camera,
[0151] S303. Determine a first feature point from the first image, and determine a second feature point from the second image, where the second feature point corresponds to the first feature point in the second image feature points;
[0152] S304. Perform dedistortion processing on the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More