

Bush pruning robot and operating method thereof
A working method and robot technology, applied in hedge trimming equipment, botanical equipment and methods, manipulators, etc., can solve the problems of high cost, low efficiency, waste of manpower, etc., and achieve high cost, easy operation, and improved adaptability Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] Below in conjunction with accompanying drawing, the present invention will be further described:
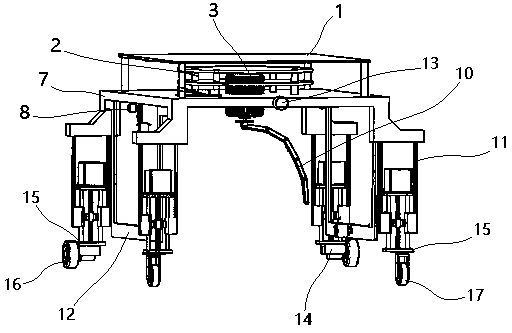
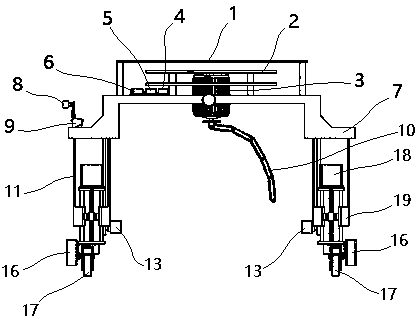
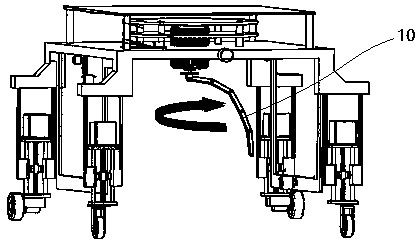
[0042] Figure 1 to Figure 6 The specific implementation of the bush pruning robot and its working method of the present invention is shown. figure 1 and figure 2 It is a structural schematic diagram of the shrub pruning robot in this embodiment; image 3 It is a schematic diagram of the work of the shrub pruning robot in this embodiment; Figure 4 It is a schematic diagram of the up and down adjustment of the bracket in this embodiment; Figure 5 and Figure 6 It is a schematic diagram of deformation of the trimming tool in this embodiment.
[0043] Such as figure 1 and figure 2 As shown, the shrub pruning robot in this embodiment includes a top plate 7 and a liftable frame, the top plate 7 is arranged on the top of the liftable frame, the middle of the liftable frame is overhead, the bottom ends of the four corners are respectively provided with walking wheels, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More