

Path planning method based on artificial potential field method
An artificial potential field method and path planning technology, applied in two-dimensional position/channel control, instrumentation, adaptive control, etc., can solve the problems of increasing manpower expenditure and reducing work efficiency, so as to reduce manpower expenditure and improve work efficiency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
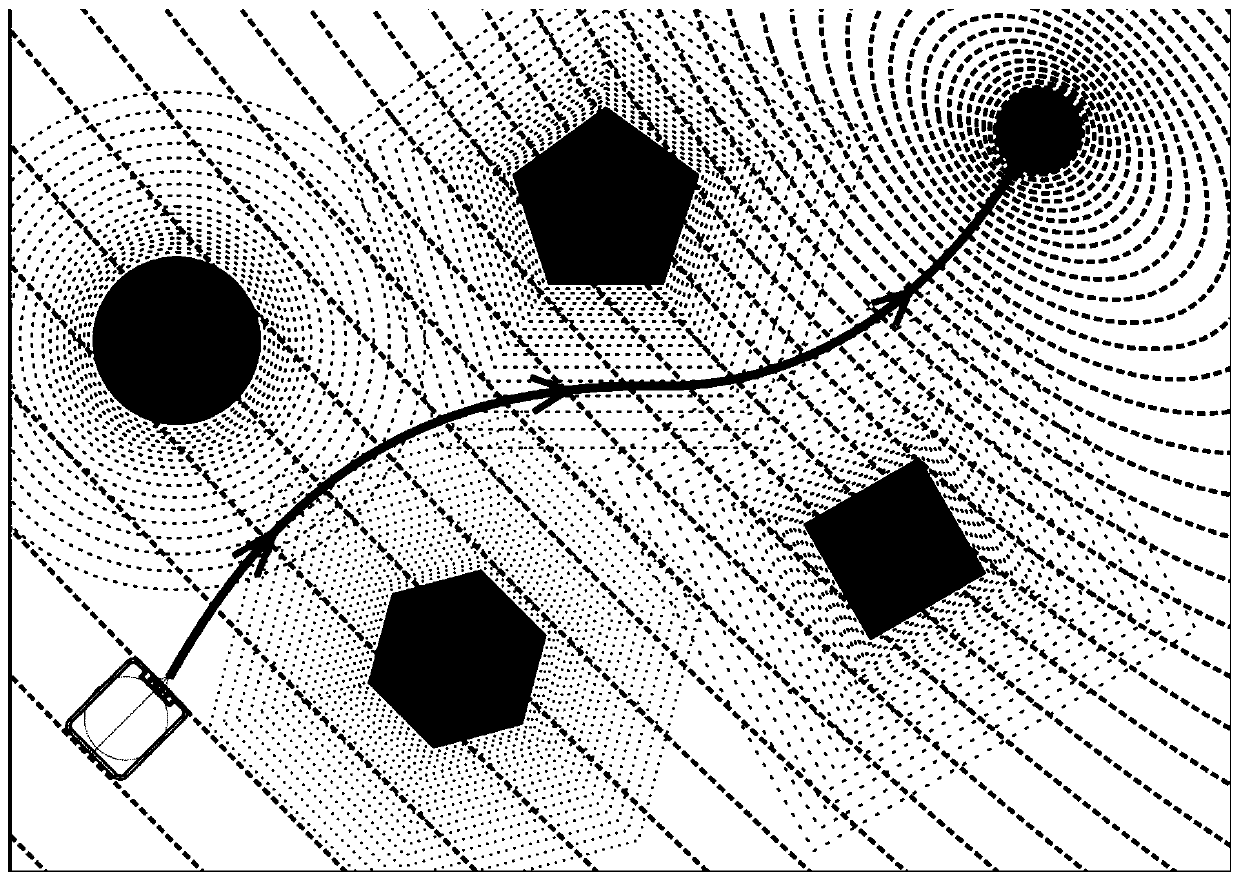
[0022] see figure 1 , the present invention provides a technical solution: a path planning method based on artificial potential field method, characterized in that: comprising the following steps:
[0023] S1. Coordinate positioning: establish a plane Cartesian coordinate system on the effective plane where the mobile machine and obstacles are located, and mark the coordinates of the mobile machine and obstacles, where: the position coordinates of the mobile m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More