

Multifunctional universal robot chassis
A robotic and general-purpose technology, applied in the field of robotics, can solve problems such as complex control systems, impossibility of use, and self-heaviness, and achieve the effects of wide application range, strong versatility, and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
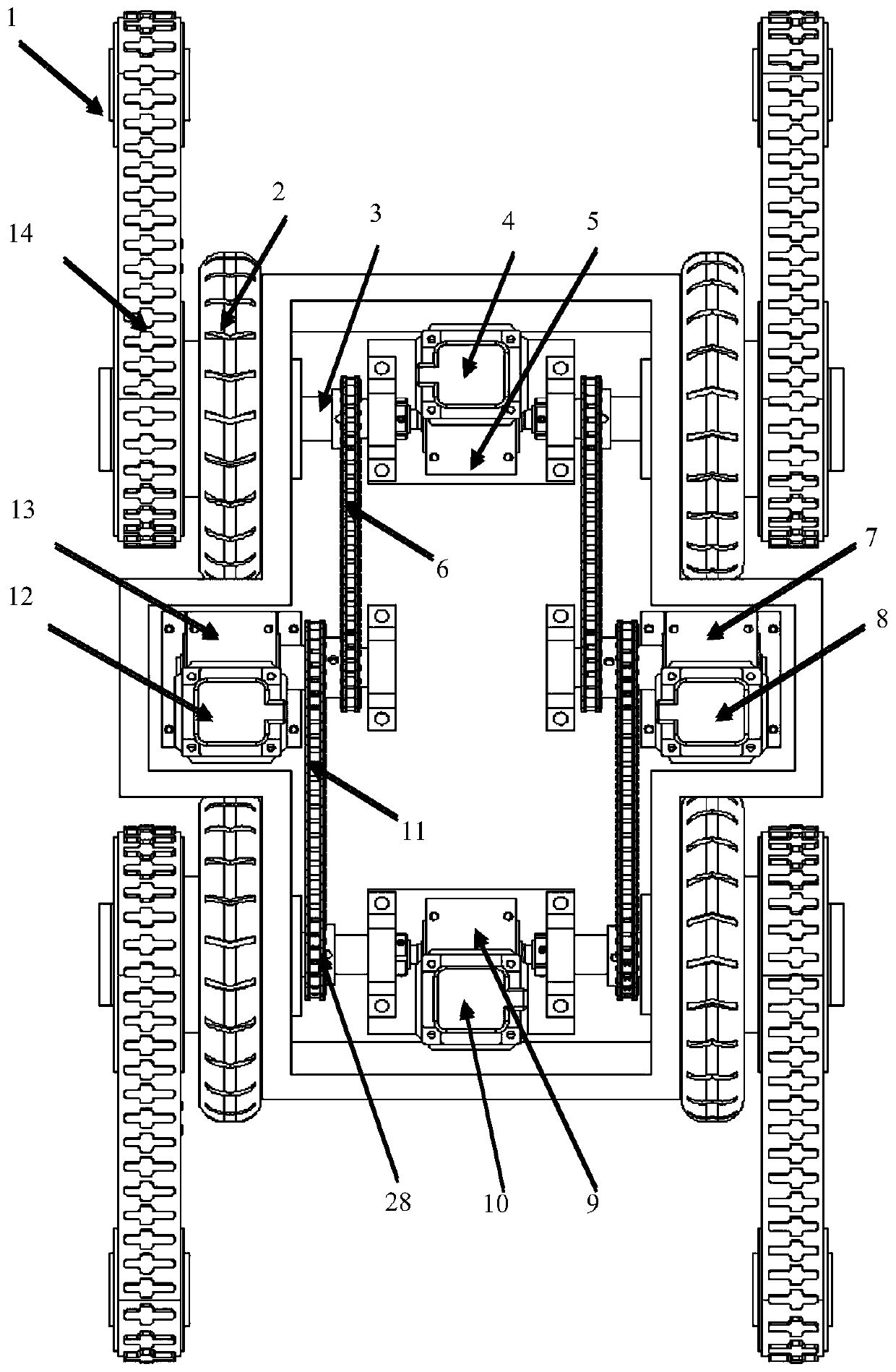
[0024] like Figure 1~2 As shown, the multifunctional universal robot chassis includes a chassis main body, a motor assembly arranged on the chassis main body, four wheel assemblies with the same structure, and a transmission assembly for driving the wheel assembly to move;
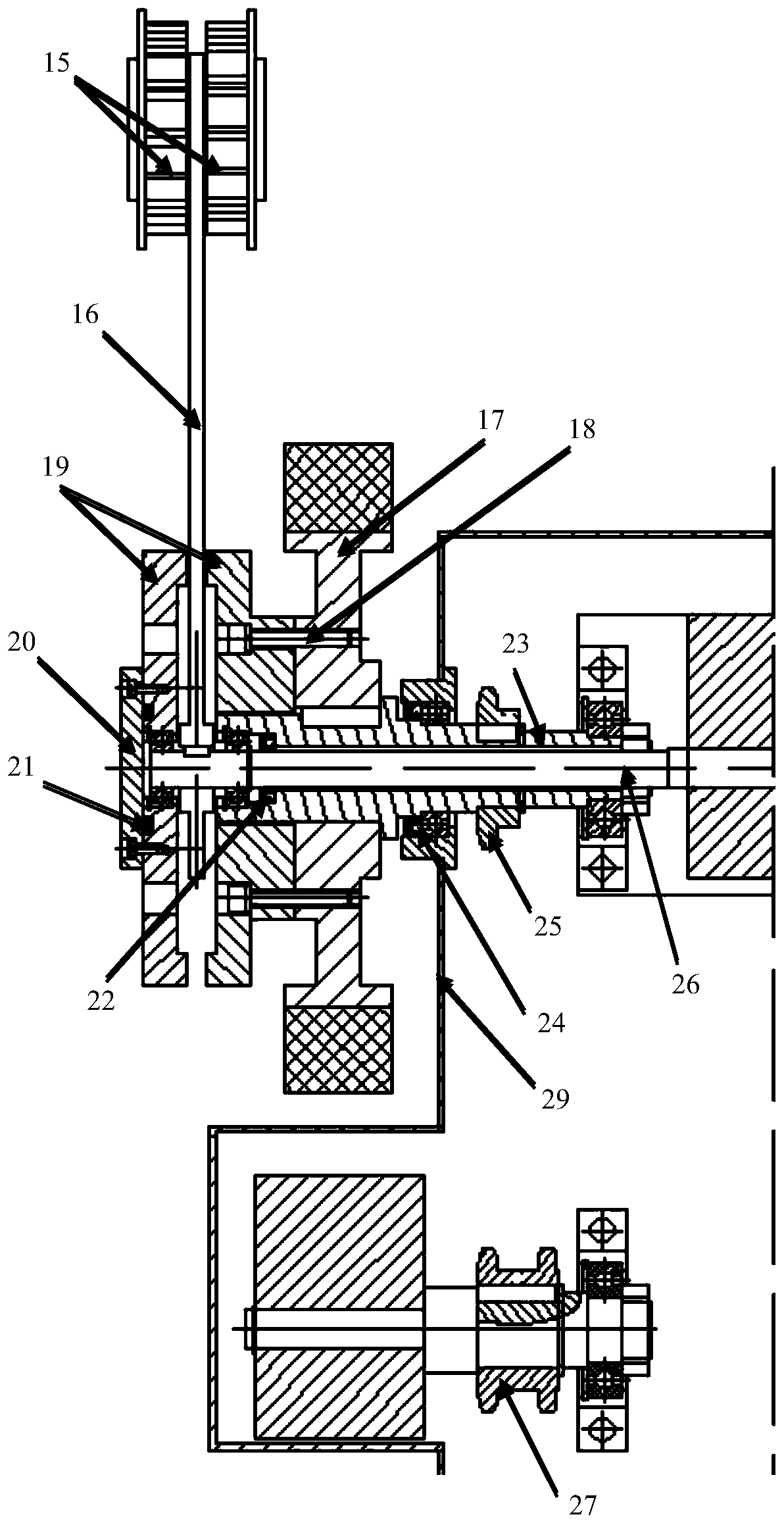
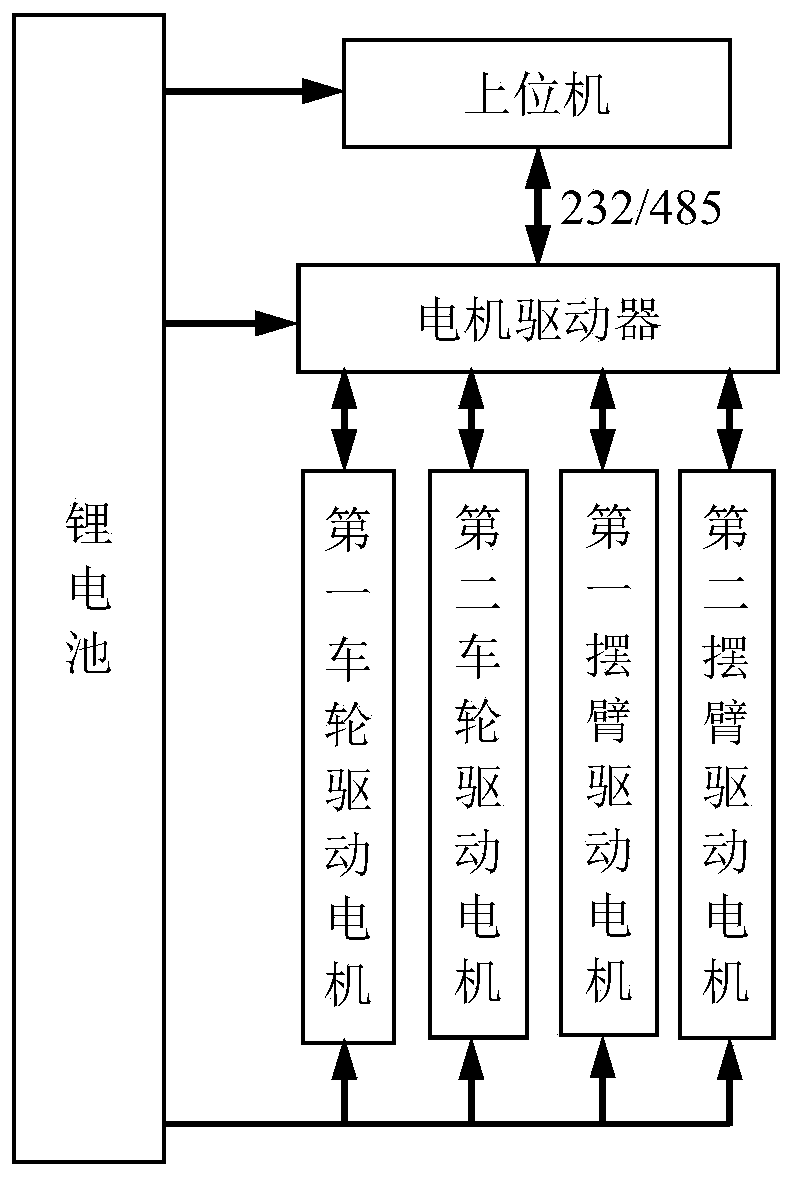
[0025] Described wheel assembly comprises wheel 2, the track swing arm mechanism 1 that is connected with wheel hub 17 of wheel 2; Described motor assembly comprises first swing arm drive motor 4, the second swing arm drive motor 10, the first wheel drive motor 8 and the second wheel drive motor 12;
[0026] Described track swing arm mechanism comprises crawler belt 14, driving track wheel 19, driven track wheel 15 and swing arm 16; Driving track wheel 19 and driven track wheel 15 are connected by track belt 14, and one end of swing arm 16 is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More