

Underwater structure surface defect detection robot system and working method thereof
A robot system and underwater robot technology, applied in the field of visual inspection, can solve problems such as high false alarm rate, difficult problems of accurate characterization and description, and low image contrast, so as to achieve the effect of improving safety and saving manpower
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be further described below in conjunction with the accompanying drawings. The following examples are only used to illustrate the technical solution of the present invention more clearly, but not to limit the protection scope of the present invention.
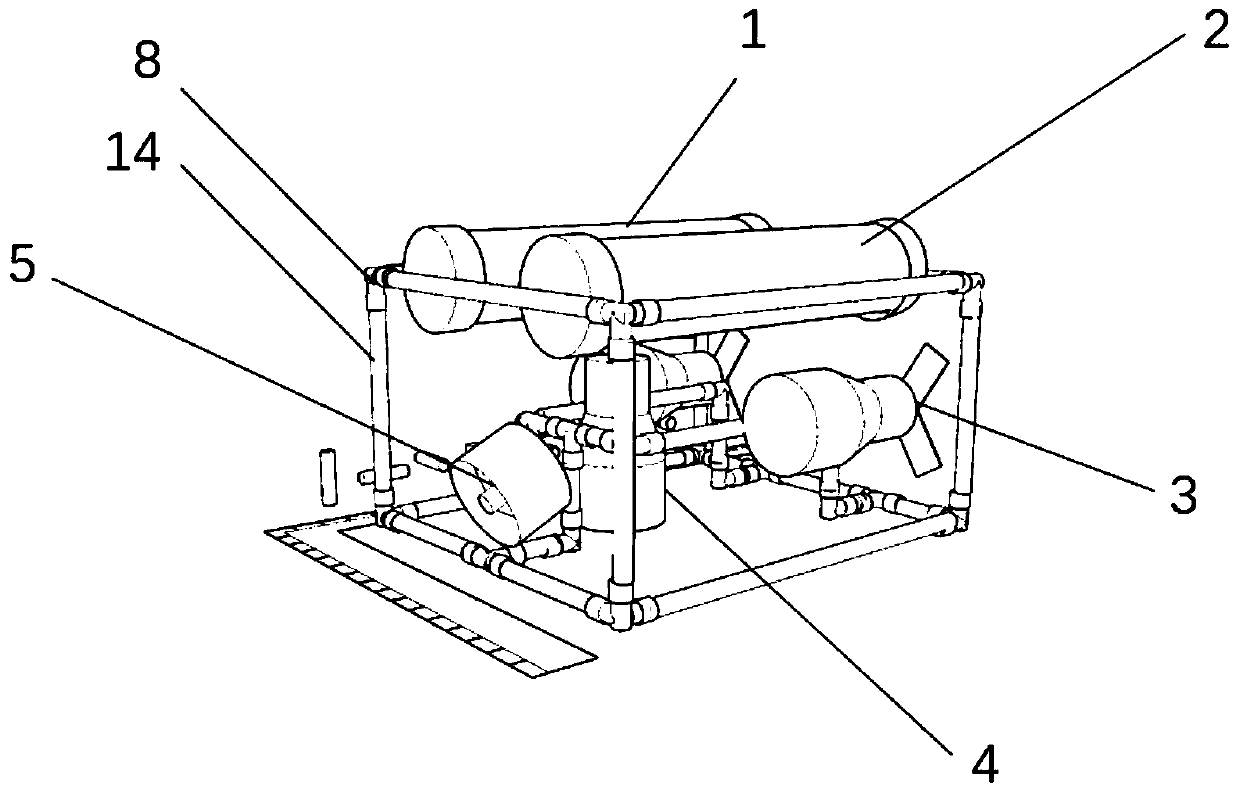
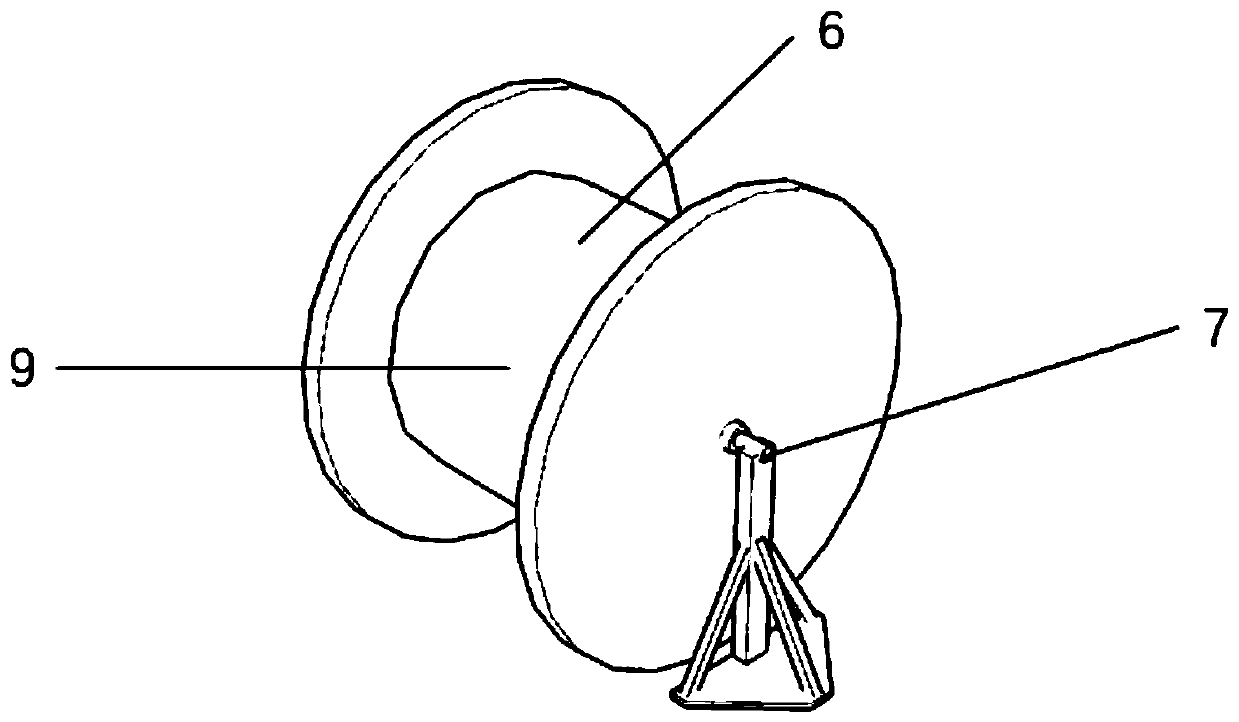
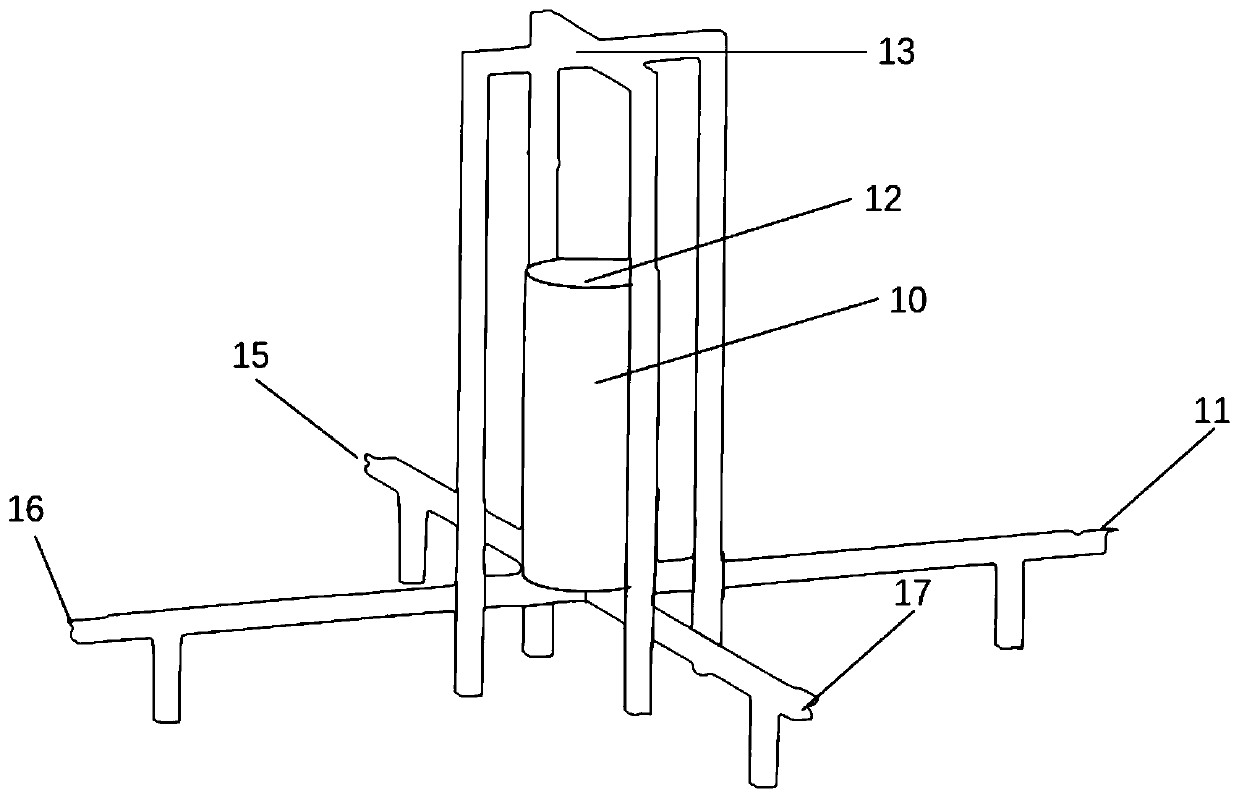
[0023] Such as Figure 1 to Figure 3 As shown, a robot system for detecting surface defects of underwater structures is used to detect surface defects of underwater structures. Wharf and bridge works. It mainly includes underwater robot detection unit 8 , cable device unit 9 and positioning array unit 13 . The underwater robot detection unit 8 includes a frame 14, and the material of the frame 14 is carbon. A binocular camera 5 is fixed on the front of the frame 14, a six-degree-of-freedom thruster 3 is fixed on the rear, a positioning module 1 and a control module 2 are fixed on the upper part of the frame 14, a battery compartment 4 is fixed on the middle part of the frame 14, and a The bat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More